Мир квадрокоптеров
Мир квадрокоптеров
Что такое квадрокоптер и как он работает?
Что выбрать: готовый к полетам квадрокоптер или построенный своими руками
Постройка: квадрокоптер своими руками
Информация по технике безопасности
Советы при управления квадрокоптером
Быстрый старт для уже собранного RTF квадрокоптера
Страница изменений в прошивке версии 3.0.х для APM ArduCopter
Страница изменений в прошивке версии 3.1.х для APM ArduCopter
Страница изменений в прошивке версии 3.2 от 25.11.2014 для APM ArduCopter
Представляем конфигурацию ArduCopter для мультикоптеров
Arducopter сочетает передовые разработки среди квадрокоптеров, а технология автопилота обеспечивает автономный полет, который каждый может использовать. ArduCopter разработан и поддерживается с помощью специального группы добровольцев открытого исходного кода. Все последние изменения доступны на сайте в рамках проекта в DIYDrones.com .
Это руководство проведет вас через установки и настройки на свой первый полет.
- Что такое квадрокоптер и как он работает? Вы новенький в этом? Эта страница дает обзор того, как квадрокоптер летает и приводит некоторые соображения для начала работы.
- Что выбрать : готовый к полетам квадрокоптер или построенный своими руками ?
- Что вам потребуется - все компоненты, что нужно для автономного квадрокоптера плюс некоторые рекомендации для датчиков и аксессуаров.
- Информация по технике безопасности - ArduCopter является мощным, летающий роботом и требует сознательного понимания для соображений безопасности. Не пропустите этот важный раздел!
- Советы при управления квадрокоптером Несколько грамотных советов по пилотированию, которые помогут вам избежать больших неприятностей.
- Быстрый старт для уже собранного RTF квадрокоптера - Краткое руководство пользователя : Приобрел готовый к полету ArduCopter? Это руководство поможет вам быстро оказаться в воздухе, чем вы можете сказать: "беспилотный летательный аппарат".
- Постройка: квадрокоптер своими руками Небольшое вступление для тех кто задумывается о сборке квадрокоптера своими руками.
- Настройка ArduPilot в первый раз - Для тех, кто строит свой собственный квадрокоптер, сборка компонентов и готовность приступить к настройке ArduCopter
APM ArduCopter является простой в настройке и простой платформой для мультимоторных систем и вертолетов. Сегодня на рынке его особенности выходят далеко за рамки основного ручного управления мультимоторных систем. В отличие от ручного управления мультимоторных систем , ArduCopter является комплексным решением БПЛА, предлагая как класическое радиоуправление, так и автономный полет, в том числе по точкам, планирование миссий и телеметрии, отображаемые на наземной станции.
Система Arducopter находится на передовых позициях воздушной робототехники и предназначена для тех людей, которые хотят попробовать современныее технологии и новые стили полета.
Особенности включают в себя:
Высокоточная подержка удержания высоты позволит спокойно летать сразу. Или выбререте удивительный режим "простой полет" (Simple mode), что делает ArduCopter одним из самых простых в управлении. Не беспокойтесь за слежением орентации вашего квадрокоптера, пусть полетный контролер этим занимается сам! Вы просто отклоняете на стик, что бы придать направление аппарату, а автопилот выяснит, что "это" исходя из орентации используя компас на борту. "Вперед", "Назад" ... кого это волнует? Просто летайте!
Вам не потребуются знания в программировании. Просто используйте простую в использовании программу на рабочем столе, что бы загрузить последнюю прошивку одним щелчком мыши и настройте с помощью программного обеспечения Mission Planner нужные вам режимы. Используйте эту программу в качестве мощной наземной станции (Ground Station).
Сотни GPS точек ждут вас (точное число зависит от памяти полетного контроллера, ArduCopter подерживает 127 точек, но есть и более продвинутые системы на базе PX4). Просто поставте точку в Mission Planner и ArduCopter полетит к ним.
Расстоянию нет предела! Можно писать целые сценарии миссий, в том числе и управление камерой! "Loiter" ("слонятся/замри") в любом месте. Просто включите этот режим и аппарат зафиксирует свою позицию используя свой GPS и датчик высоты.
RTL (Вернуться на старте). Щелкните переключаетелем , что бы вернуть ArduCopter на место старта автоматически.
Планирование всех миссий доступны через опциональную двухстороннюю связь. Путевые точки, смена режимов полета, даже тюнинг может быть сделан с вашего ноутбука, в то время как аппарат находиться в воздухе!
Автоматический взлет и посадка. Просто введите аппарат в этот режим и смотрите как ArduCopter сам выполнит свою миссию полностью автономно, вернувшись домой сядет на землю перед вами.
В связи с богатым набором функций и полностью автономных возможностей АРМ, кривая обучения может выглядеть несколько пугающим. К счастью набор исчерпывающей информации сделает это стремление очень простым и достижимым.
Пожалуйста, не поддавайтесь искушению пропустить шаги и бросаться к быстрому полету. Это робототехника и авиация комбинированного типа из которых являются довольно сложными вещи сами по себе. Следуйте инструкциям и у вас будет свой робот в воздухе.
Автономные роботы, летающие машины, электрические системы высокой энергии, вращающиеся лопасти - это потенциально опасно. Всегда помните о технике безопасности это позволит вам остаться целым и не вредимым:)
Мы уделяем много времени безопасноти , пожалуйста будте предельно внимательны управляя этими технологиями. Этот продукт мы делаем для благожелательного использования.
Помимо официального зарубежного сайта разработчиков, которые помогут ответить вам на ваши вопросы вы можете обратиться и в русскоязычную группу Вконтакте.
Что такое квадрокоптер и как он работает.
В дальнейшем, где это возможно слово мультикоптер будет заменено на более ходовое слово на слуху - квадрокоптер
Квадрокоптер - это летающий аппарат, двигающися посредством регулировании скорости вращения двигателей с пропеллерами
- квадрокоптер это один из простых летательных аппаратов у которого много поклонников.
- квадрокоптер аэродинамически не устойчив и требует компьютерное управление для сабильного полёта.
- Поэтому квадрокоптер это целая “летающая система” и если его "компьютер" не работает, то он не летает.

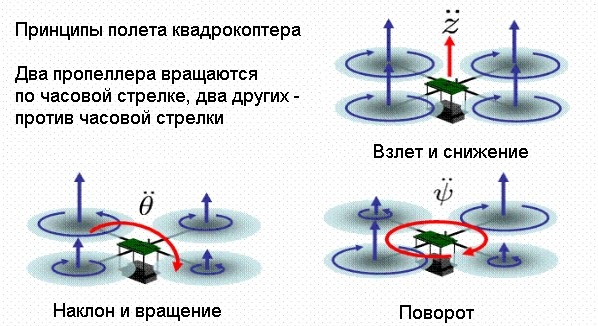
- квадрокоптер, как показан выше, является простым типом мультикоптеров , с каждой парой двигателей вращающихся в противоположную сторону.
- это позволяет ему использовать осевое вращение (Yaw) вправо или влево, посредством ускорения одной пары и замедлением другой пары двигателей.
- горизонтальное движение осуществляется за счет ускорения двигателями (увеличение тяги оборотами) на одной стороне и снижение тяги на другой.
- это позволяет наклонить квадрокоптер (Roll or Pitch) в нужном направлении движения , после чего тяга двигателей уравновешивается.
- угол наклона , как правило определяет скорость движения в этом направлении.
- что бы скомпенсировать порывы ветра компьютер наклоняет автоматически квадрокоптер в сторону направления порыва.
- для того, что бы это работало на квадрокоптере должны быть электронные “гироскопы”, которые измеряют уровень по трем осям
- помимо этого он может быть оснащен электронными акселерометрами, которые определяют смещение по трем осям
- контроль высоты и её изменение осуществляются путём ускорения или замедления оборотов двигателя.
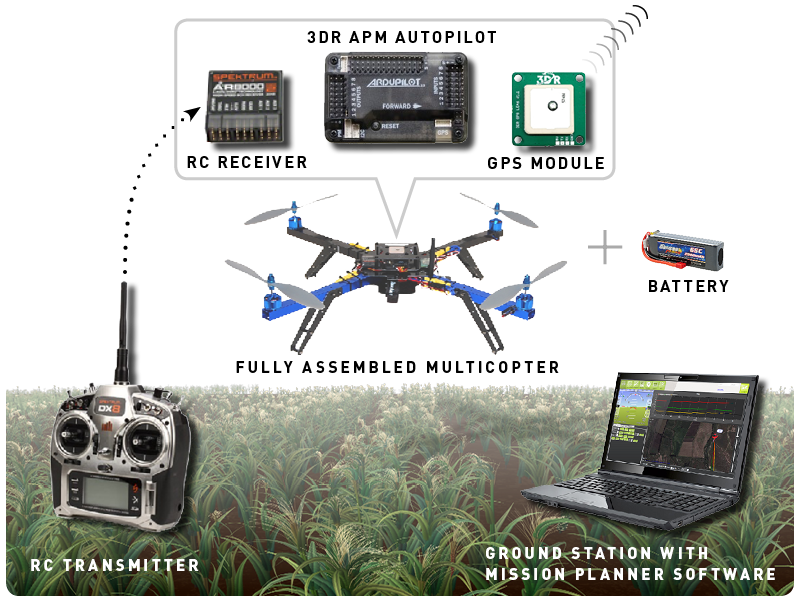
Cистема мультикоптера:
Для того, что бы летать вам нужно:
- сам квадрокоптер, включая раму, моторы, регуляторы скорости (ESC) винты (пропеллеры) и батареи
- Полетный контроллер или автопилот, который обеспечивает стабилизацию и в более развитых системах (таких как APM 2.6) автоматический контроль.
- Компьютер или ноутбук (телефон, планшет) для того, что бы запрограмировать полетный контроллер (что не обязательно) и для использования в качестве телеметрической наземной станции.
Демонстрационное видео демонстрирующее ручное и автоматическое управление.
- Полет начинается с режима Stabilize “стабилизация” , который обеспечивает стабилизацию по горизонту и ручное управление.
- Loiter Mode - квадрокоптер автоматически подерживает позицию и высоту , но допускает ручное управление.
- Simple Mode - позволяет управлять квадрокоптером без учета орентации ( используя компас)
- Auto Land - автоматическая посадка и переход в режим постановки в охрану (Disarm) , когда он приземлится.
Важные элементы для квадрокоптеров:
Основные требования квадрокоптеров это обладание досаточной тяги у моторов пропеллеров , способные его поднять:
- Благодаря тому, что технологии литиевых батарей позволяют это сделать
- Предыдущие технологии не позволяли обладать достаточным потенциалом и были слишком тяжелые и не производительные.
- Бесщеточные двигатели (Brushless motor) и электронные контроллеры скорости (ECS) повышают полетные характеристики, выносливость моторов и их надежность (работа на отказ). при разумной дисциплине можно летать в дождь и не волноваться за моторы.
- Карбоновые , алюминевые и стеловолоконные технологии облегчают вес давая эфективность и производительность по соотношению к весу апарата.
- Полетный контроллер (ArduPilot) является мозгом , который позволяет квадрокоптеру творить потрясающие вещи.
- Группа разработчиков опирается на APM контроллер , который имеет хороший потенциал
- В полетный контроллер встроенно много датчиков, необходимых для автоматического полета
- В эту систему включены : трех осевой гироскоп, трех осевой акселерометр, компас (магнитометр) , барометр (высотомер) и GPS.
- ArduPilot подключается к моторам , радиопередатчикам, телеметрии и камеры контроля.
- Современные радиоуправляемые системы 2.4МГц обеспечивают быструю и очень надежную связь с квадрокоптером.
- Программа Mission Planer позволяет обновить прошивку Автопилоту
- Программа так же позволяет загружать пользовательские параметры (миссии / точки) и прочие инструкции в квадрокоптер.
- Кроме того, можно использовать планирование миссии полета , анализировать журналы полета записаные на автопилот.
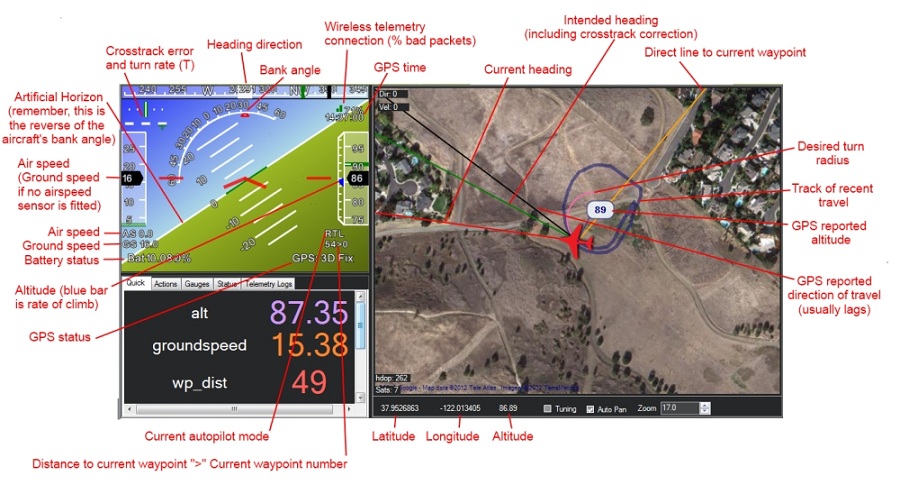
- А еще программа может работать как телеметрическая наземная станция (Ground Station) , где отображаются в реальном времени данные полета.
Требования к проектированию мультимоторных аппаратов
- Квадрокоптер - устойчивая система , но ей нужнен тщательно подобранные компоненты.
- Прогнозируемый вес, производительность, время полёта и полезной нагрузки - это требует сбалансированного подхода, что бы добиться хороших результатов.
- Высокая производительность, как у квадрокоптеров (quadrocopter) для хобби или использования камеры (сьемок с воздуха) требуется уже более тяжелоподъемный мультикоптер - гексакоптер, октакоптер (hexacopter, octacopter)
- Размер рамы и её вес, двигатели и пропеллеры, мощность батареи и полезная нагрузка - являются важными параметрами при постройке мультикоптера.
- Небольшой квадрокоптер (quadrocopter) идеально подходит , что бы научиться летать, хорош для новичков, которые осваивают это.
- Большой гексакоптер (Hexacopter) или октокоптер (Octacopter) с камерой для съемок дорогой и серьезный аппарат, требует професиональных навыков.
- это сильно бъет по карману, в случае его падения и это стоит учитывать.

Готовые к полёту (RTF) или построй сам
Готовые к полету (RTF - Ready To Fly)
- есть много аргументов обеих сторон этого вопроса, можно купить готовый к полету квадрокоптер или создать свой собственный.
- можно приобрести крошечный квадрокоптер , который достаточно дешевый и на удивлении стабильный и простой в управлении и освоении.
- некоторые из них настолько малы , что способны летать в помещении и менее травмоопасны, а еще достаточно крепкие .
- крошечный hubsan x4 являеся хорошим и недорогим готовым для полета квадрокоптером , отлично подходит для первого опыта и изучения этих систем.

Квадрокоптер построеный собственными руками
- В качестве альтернативыможно можно рассматривать недорогой ARF (почты готовый к полету) полу-построенный квадрокоптер.
- Рамы F450 и F330 ARF обладают хорошим соотношением цена\качество для постройки квадрокоптера.
- Эти рамы держатся достаточно долго для новичков, которые обучаются полетам
- Мой F450 c APM 2.6 провел несколько часов полетов и неплохо сохранился после тяжелых посадок.

Так же стоит отметить ваш начальный опыт, который лучше будет усвоен с готовым к полету квадрокоптеру. Если модель квадрокоптера будет на примере Hubsan H107L то вы получите прекрасный опыт и понимание как он летает за меньшие деньги. Далее по мере уделения времени над полетами вам стоит понять - ваше это или нет.
Автор сайта заинтересован , что бы вы покупали модели по вашему возрастающему опыту.
Что вам потребуется
Квадрокоптер с рамой, моторами , регуляторами оборотов (ESC) и пропеллерами
Модели доступны в нашем магазине, Эти мультикоптеры являются быстрыми, слаженными и доказали свою работу с APM Автопилотом. Для новичков и базовых миссий квадрокоптеры являются наилучшим вариантом для простоты и экономичности в затратах. Гексакоптеры являются более стабильными имею хороший дизайн, отлично подходят под сьёмки. Многие другие конструкции, такие как октокоптеры и классические вертолеты с тарелкой перекоса тоже поддерживаются APM Ardupilot Mega.
От 6+ и больше каналов передатчик и приемник.

Вам потребуется в настройки и управлении по радиоканалу вручную контролировать свой мультикоптер и переключать свои насроенные автоматические режимы. Можно использовать любую радиоаппаратуру по крайней мере шестиканальную и больше. При цене 54$ Turnigy 9x является экономным и популяроным выбором. Если вы предпочитаете более качественную аппаратуру , то можно выбрать Futaba или Spectrum .
Автопилот с GPS
Автопилот вашего мультикоптера дает возможности для автономного полета . APM является надежным , Arduino совместимая платформа которую уже используют десятки тысяч пилотов по всему миру. Это хороший выбор для большенсва потребностей и использования разных полетных режимов. Модуль GPS имеет важное значение для Автопилота , он обеспечивает его данными из реального мира о своем местоположении, которые позволяют автопилоту лучше орентироваться при выполнения разных режимов. Последняя версия GPS совмещена с датчиком компаса (магнитометор) , что позволяет минимизировать магнитные помехи, чем в предыдущих версиях a APM 2.х

Литиевые батарейки (LiPo) и зарядные устройства.
Мультикоптер требует литий-полимерную (LiPo) батареи. Хорошим правилом является использование 1000 мАЧ на мотор. Для квадрокоптера 4000 мАЧ будет работать хорошо. Так же стоит учеть ток разряда , который измеряется в С (максимальный ток разряда). Например моторы 2212 Turnigy допускают 25А максимально, следовательно пиковое потребление моторов будет 100А , батарейка дожна быть не ниже х = 100А/4000мА, получаем х = 25С - это требуемый параметр токоотдачи для батарейки в 4000 мАЧ. Зарядные устройства тоже подбираются под возможности заряда батареи, как правило это 1-2С от емкости батареи, вам может подойти простой интелектуальный зарядник iMAX B6 который справиться с этой задачей по началу, далее, если ваш опыт будет расти уже потребуется более продвинутые зарядные устройства.


Наземная станция с програмным обеспечением (Ground Station Mission Planner) Настраивать миссии легко с ПО Mission Planner , данная программа бесплатная с отрытым исходным кодом. Вы можете с легкостью назначать миссии с наземной станции. Рекомендуем выбрать ноутбук, нетбук, планшет или телефон с ОС для этого

Радиомодули для телеметрии.

Если вы собиратесь минимизировать количество проводов между наземной станцией и мультикоптером, то рекомендуем использовать комплект радио телеметриии , который позволяет общатся с наземной станцией находясь в воздухе. Данные передаются в реальном времени по протоколоу MAVLINK , это позволит значительно расширить автономные функции.
Квадрокоптер своими руками
Существует много решений , как собрать свой квадрокоптер, но как показывает практика большинство людей сталкивается с теми или иными проблемами при постройке квадрокоптера. Не имея представления как им управлять и пытаться собрать хоббийный квадрокоптер, а это, как правило рама 450 класса - это очень затратно по деньгам. Даже у меня первый самосборный квадрокоптер, без опыта полетов и опыта сборки побывал в воздухе 5 секунд и разбился. Все из-за того, что мне не были понятны нюансы при сборке и настройке полетного контроллера. Сборка квадрокоптера подразумевает , что у вас как минимум:
- Есть опыт в пилотировании хотя бы маленького квадрокоптера, например Hubsan X4 H107L
- Есть понимание принципов работы всех его узлов
- Вы ознакомлены с техникой безопасности (а это означает понимание, что даже маленький квадрокоптер хорошо может поцарапать, даже в руках детей это очень опасная игрушка). Не зря на коробке даже маленького квадрокоптера написано, что для детей от 14 лет. Редко когда бывает исключение.
Поэтому исходя из вышеизложенного рекомендую не пожалеть и потратить деньги на маленьких 4-х канальный квадрокоптер и научиться на нем как минимум: висеть в воздухе, летать по кругу, летать по "восьмерке", пролетать в разного рода щели, летать на улице в ветер и конечно же - летать лицом к себе. После того как спустя месяц или два практики вы не забросите полеты - можно возращаться на этот сайт и мы приступим к сборке уже настоящего хоббийного автономного квадрокоптера. Переходя из класса в класс вы получаете опыт в пилотировании. А когда время дойдет до квадрокоптера своими руками :
- Задумайтесь - лучше точный расчет деталей и комплектующих, чем непонятно что.
- Начните получать опыт в пилотировании с простого и маленького простого квадрокоптера готового к полету (RTF версия).
- Для тех кто с "руками" можно построить на основе рамы F450, хороший квадрокоптер, который мы опишем ниже.
- Первый квадрокоптер не должен быть для фото / видео или FPV - вы должны просто построить квадрокоптер и в первую очередь научиться летать.
- Даже если вы знаете , что вам действительно нужно вы должны понимать , что вам необходимо привыкнуть к управлению вашего квадрокоптера и его полетного контроллера.
- Если вы хотите получить массу удовольствий от управления начните с недорогого , безопасного , прочного и готового к полетам маленького квадрокоптера , такого как Hubsan X4 H107L.
- Если вы серьезно подошли к делу , то попробуйте ARF версию рамы для постройки или если вы хотите просто лететь и может себе это позволить - используйте RTF версию (готовый к полетам квадрокоптер).
- Не начинайте со сборки рамы, даже если у вас есть полная инструкция как построить действительно хороший квадрокоптер для акробатики и спорта.
- Не начинайте строить свою собственную раму; даже среди строителей больше неудач, чем успехов; не повторяйте их ошибки.
- Не начинайте с большого и опасного квадрокоптера с кучей фото или видео аппаратурой на нём - это очень опасно и вы будите сожалеть об этом.
- Небольшой и маневренный квадрокоптер всегда приносит больше удовольствия, чем большой, медленный и громоздкий гексакоптер или октакоптер (hexacopter octacopter).
- Для хорошей профессиональной сьемки или фотографии всегда требуются большие камеры, вам лучше думать о маленьком, легком и маневренным квадрокоптере.
- Безопасность полетов очень важна, держите безопасное растояние подальше от людей и дорогих вещей, не забудьте посетить страницу по безопасности.
Китайские детали - это хорошо или плохо?
- Не все китайские детали хороши, вам нужно быть осторожным. очень дешево - плохая идея!
- По мере приобритения опыта вы поймете какие детали качественные.
- Рекомендуется использовать хорошую и зарекомендовавшую в качестве электронику.
- Если вы желаете получить аксессуары , такие как GPS то лучше тоже воспользоваться оригиналом или качественным аналогом.
- Если у вас есть желание сделать вид от первого лица (FPV) то используйте специальные наборы OSD и видеоочки с передачиком и приемником, желательно хорошие.
- Что касается камер GoPro Hero 3 и особенно Black Edition то это работает хорошо.
- ARF набор рамы DJI и ему подобных имеет хорошее качество, не смотря на то что сделано в Китае.
- Микро квадрокоптеры производителей Traxxas, Hubsan и Helimax настоятельно рекомендуются, они так же сделаны в Китае, но являются отличным способом, что бы начать изучение.
- Моторы, батарейки, регуляторы ESC, рамы и даже аппараура FrSky или Turnigy RC радиопередатчики и приемники могут быть очень хорошим предложением от Китая.
- Много товаров, которые мы покупаем на внутреннем рынке на самом деле сделаны в Китае и конечно их качество сильно варьируется, независимо от страны происхождения.
- Мотор стоимостью 25 долларов от rctimer вряд ли будет того же качества, что и эквивалентной 100 долларовый Tiger-Motor, но это всего лишь $25.00.
- Хотя прямые поставки китайского товара, как правило, довольны надежны по доставке, поддержка послепродажного или возврат, зачастую, весьма проблематичный.
- Если вы учитываете от десяти до двадцати процентов брака или повреждения для китайского товара - вы не будете разочарованы.
- В любом случае, начните с двух или трех рекомендуемых "сборок" ниже, что бы довести дело до конца и научиться летать в первую очередь.
Варианты квадрокоптеров на которых возможно вам стоит остановиться в выборе:
Недорогой RTF - Ready To Fly Nano, Micro или маленький квадрокоптер
Если вы новичок в квадрокоптерах, я предлагаю вам начать с одного из них недорогой готовым к полету квадрокоптеру (ready to fly).
- Они приходят со всем необходимым и не требуют сборки. Их рама очень прочная и прекрасно подходят для обучения.
- Они также принесут массу удовольствия, легко и безопасно можно использовать в закрытом помещении и стоят меньше, чем три тысячи рублей.
- Важно, что Вы получите вам гораздо лучше понять, как они работают, и о том, что вы действительно хотите делать дальше.
- Traxxas QR1 Quadcopter является недорогим готовым к полету микроквадрокоптером (RTF Micro Quadcopter), отлично подходит для первого опыта. (Левый рисунок ниже).
- Hubsan X4 идентичен Traxxas и за доплату вы можете получить его еще с видео камерой 720P HD.
- За $ 200.00 есть FPV версия Hubsan , которая поставляется с аппаратурой со встроенным ЖК дисплеем для передачи видео с квадракоптера.
- Запасные части для Hubsan доступны везде
- Helimax 1SQ еще один микро квадрокоптер.
- Есть очень крошечный Estes Proto X - это на самом деле Hubsan H111, который летает на удивление хорошо (Ближний и правое изображения ниже).



- Внизу на картинке слева очень прочный квадрокоптер, UDI U818A 2,4 Quadcopter с камерой от Amazon Prime.
- Blade Nano QX справа внизу также настоятельно рекомендуется, очень легкий и простой в управлении и невероятно прочный.


- Если вы только начинаете: приобретите один из этих недорогих, небольших, прочных квадрокоптеров и научитесь хорошо летать - это сэкономит вам много денег.
Комплект "все включено"
- Самый простой способ, чтобы построить - это купить один комплект, который имеет все детали, необходимые в одной коробке и набор инструкций для каждого шага.
- Помимо готовых к полету вариантов (Ready To Fly) комплект "все включено" является наиболее надежным и простым способом построить качественный мультикоптер.
- Обычно все компоненты хорошо сбалансированы друг с другом и выполнены хорошо.
- Для полной комплектности в наборе идут болты и гайки , а так же детали для пайки.
- Процедура сборки обычно хорошо изложена в прилагаемых инструкциях.
- Недостатком является то, что часто качественные комплекты дороже, чем другие альтернативы с возможностью изменения комплектации.
- Если вы еще не хорошо квалифицированы в самостоятельной постройке квадрокоптеров, то набор "все включено" безусловно лучше для начала.

ARF комплект - почти готовый к полету квадрокоптер.
- Если у вас уже есть аппаратура с передатчиком вы можете сэкономить деньги и и построить хороший автономный квадрокоптер.
- Даже если вы только начинаете есть несколько действительно хороших вариантов.
- ARF комплект квадрокоптера 450 класса может быть хорошим вариантом.
- Этот комплект поставляется с рамой, четырьмя бесщеточными двигателями, 4 регуляторами ESC и винтами.
- Вам нужно осностить его полетным контроллером APM, аккумулятором и аппаратурой с приемником и передатчиком.
- Рама F450 очень жесткая и прочная вещь.
- Стоимость может варьироваться в пределах 15-20 тысяч рублей за почти готовый квадрокоптер с моторами, регуляторами, винтами, батарейками и зарядкой
- В качестве альтернативы можно взять раму F330 - это тоже отличный выбор и хороший выбор в небольших пространствах для полетов.
- Существует страница Вики для построения F330 (Here!) и это применимо к F450 также.
- Большинство почти готовых комплектов (ARF) это далеко не крепкие , будьте готовы к ремонту.
- Если вы хотите минимальное вложение , начните с простого класса квадрокоптера достуного вам по карману, по мере обучения можно переходить на более дорогие модели.
- Рама квадрокоптера F450 может использоваться вместе с экшен-камерой GoPro или как FPV платформы.
- Рама гексакоптера F550 (Hexacopter) хороша для более продвинутого использования, но этот выбор не идеален в качестве первого мультикоптера.

Комплектующие рамы
- Как только вы соберетесь к постройке своими руками квадрокоптера вы получите хороший опыт в строительстве, но это уже не для новичков.
- Исключением являеся, если вы внимательно следуете инструкциям по сборке квадрокоптера.
- Об использованных методах постройки рам можно узнать из каждого "журнала постройки".
- Есть достаточно интересные модели рам, которые не разрушаются, например спортивно-акрабатические рамы Hoverthings flip 380 sport frame.
- Эта рама использует жесткую и сильные карбоновые лучи которые обрабатываются на ЧПУ станке из толстоко стекловолокна.
- Это позволяет использовать те же моторы и регуляторы ESC, что и в раме F450 DJI c пропеллерами до 10 дюймов.
- Я купил Флип Sport Kit плюс дополнительная пара "вкладка" секций типа центр и дополнительных 7/8 "прокладками".
- Рама позволяет размещать батарейку под основной платой специальными держателями.
- Так же использовать специальный регулятор 4-в-1 помещенному между центральными пластинами рамы.
- Совмещенный регулятор ESC 4 в 1 ESC производит меньше помех и компактен, чем 4 обычных регулятора ESC и плата распределения питания.
- Я использую карбоновые 10 дюймовые пропеллеры, потому что они очень жесткие и очень эффективные.
- Моя цель заключается в создании еще более жесткого и более высокопроизводительного квадрокоптера, чем DJI F450.
- Хотя это небольшой квадрокоптер является мощным и достаточно гибким, чтобы использовать FPV видео и / или камеру GoPro с "подвесом".

- Рама Tarot 650 из карбона довольно большая и позволяет устанавливать пропеллеры до 17 дюймов.
- Я использую моторы 360kv медленной скорости и большого диаметра, которые предназначены для использования более эффективных и больших пропеллеров на низких скоростях.
- Я буду использовать разнообразные пропеллеры - от 14 до 17 дюймов, чтобы исследовать производительность и эффективность при различных размерах пропеллеров.
- Хотя акрабатический спортивный квадрокоптер 330, который показан выше может быть целесообразным для первого квадрокоптера этот Tarot 650, безусловно, нет.
- Это четырехмоторный аппарат достаточно велик, чтобы быть тяговитым и долгим в полете на выносливость и нести большую видео или фотокамеру, но:
- Для подъема полезной нагрузки в 2кг с квадрокоптером вам нужно уточнить конфигурацию моторов и пропеллеров.
- Четыре мотора Tigermotor MN4010 475KV стоимостью около $ 86 каждый, четыре 15 х 5 или 16 х 5 пропеллера и четыре высококачественных регулятора ESC 30А.
- Так же нужно 10000 мАч 4-х баночную Lipo батарейку (две 5000мАч) для достижения примерно 10 минут полетного времени на 4KG общего веса.
- Квадрокоптер способный поднять общую массу 4кг (включая 2кг полезной нагрузки) и уметь взлетать при 50% тяги (это необходимость по технике, а так же иметь возможность 6кг взлета).
- Вам понадобится 16х5 пропеллеры для достижения тяги и эффективности необходимые для подъема 4KG с разумным временем полета.
- Именно поэтому требутся большие двигатели с минимальным кВ, они должны быть высокого качества, что бы выдержать непрерывную высокую нагрузку производительности.
- Это настоятельно рекомендуется, что бы вы не пытались построить один из таких апаратов в качестве первого из непонятно чего.
- Есть очень полезная ссылка для расчета производительности различных мультикоптеров и их компонентов - калькулятор квадрокоптера: eCalc

Или рассмотрите вариант крошечного квадрокоптера 250 класса стоимостью рамы в $10 с возможностью FPV и вы можете летать в помещении или вне.


Квадрокоптер своими руками из подручных средств
- Люди, которые ни разу не использовали квадрокоптеры часто пытаются построить сами и у них редко хорошо получается.
- На самом простом функциональном уровне квадрокоптер может быть построен из палок и фанеры и он будет летать.
- Но это маловероятно, что он будет хорошо летать и будет пригоден к эксплуатации и хорошо перносить посадку
- Конечно - это не способ сэкономить. Готовые к полету (RTF) и почти готовые (ARF) комплекты можно отнести к хорошему качеству деталей и сопуствующих компонентов и фактически они стоят меньше.
- Даже если вы опытный моделист-строитель, машинист или инженер, не делайте этого!
- У квадрокоптеров свой собственный набор динамики и требований.
- Пока вы не имели опыта работы с ними у вас нет практически никаких шансов на проектировании и изготовлении достойный квадрокоптеров.
- Существует очень симпатичный дизайн квадрокотпера сделаный для новичков из изогнутого листового алюминия.
- К сожалению листовой алюминий мягкий, тяжелая и жесткая посадка могут погнуть его.
- Даже если вы очень опытный, безусловно, нужно сделать несколько рам, прежде чем достичь стоющего дизайна.
- Что бы быть экспертов в этом вы должны сделать по крайней мере 3 или 4 успешно коммерческие рамы для квадрокоптера.
- Я сделал более десятка макетов рам на компьютере и до сих пор ни одну не построил, я еще не готов, и я знаю это.
Качественные бренды готовые к полету
Несколько слов о брендах выпускаемых RTF версии (готовых к полету) квадрокоптеров, таких как в Parrot , DJI Phantom и Blade 350QX .
- В рамках своих возможностей они хорошо сделаны и это разумая цена за то , что они делают.
- Они не легко модифицируются и улучшаются, и не так легко перейти на более мощный контроллер полета, как например APM или Pixhawk.
- Таким образом они они предлагают одно решение , но оно заводит вас в дорогостоящий тупик.
- Вы можете собрать свой комплект почти готовой к полету рамы с использованием контроллера ArduPilot Mega APM примерно за те же деньги и быть далеко впереди.
Какой подход действительно вам нужен?
- Это очень важно, чтобы он соответствовал вашему уровню возможностей, если вы уйдете слишком далеко - вы получите негативный опыт.
- Тем более гораздо важнее выбрать надежный и консервативный подход, чем пытаться все делать сразу.
- Самый простой вариант - получить готовый к полету RTF или набор "все включено".
- Хороший почти готовый к полету набор ARF и тщательно подобранные остальные компоненты приведут вас к выдащим результатам.
- Подход ARF часто стоит несколько меньше может дать посмотрить свой аппарат специально с учетом ваших потребностей.
- Выбор подхода , приобретение комплекта рамы (frame kit) предполагает, что у вас есть достаточно знаний, чтобы подобрать соответствующие компоненты, которые будут работать вместе.
- Это позволит вам собрать квадрокоптер, специально оптимизированный под ваши потребности и желания.
- Если вы не найдете и не будете действовать подробному описанию по постройке и сборке рамы (frame kit) - сделайте так, что это был не первый квадрокоптер в вашей жизни.
- Очевидно, что для построки с нуля - вдвойне сложно, как постройка с использованием комплекта рамы.
- Процес постройки и его компоненты должны соответствовать так, что бы квадрокоптер работал хорошо, это могут позволить опытные люди.
- Есть дорогие, высокого класса квадрокоптеры, которые, как правило, ориентированные на коммерческую фото или видео аппаратуру и это выходит за пределы нашей области здесь.
- Все квадрокоптеры которые тут описаны будут иметь подлинные 3dr APM, PX4 или Pixhawk полетные контроллеры.
- Это лучшие и наиболее функциональные полетные контроллеры, которые имебт большую поддержку DIYDrones сообщества.
- Будьте внимательны при использовании копий полетных контроллеров они могут иметь небольшие различия, которые могут их сделать непригодными к использованию.
- Просто предупреждаю - будьте бдительны и вы получите то, за что заплатили.
Почему стоит рассматривать полетный контроллер APM?
- APM 2.5 и 2.6 являются наиболее последними и окончательными устройствами полетного контроллера ArduPilot : Обзор apm 2.5 и 2.6
- APM верный и чемпион, который используется в полной мере, он имеет множество возможностей.
- Но 8-ми битный APM процессор в будующем покажет свои ограничения при нововведниях.
- APM является отличным и проверенной платформой, способной выполнять все текущие требования.
Техника безопасности, прочитайте перед полетами
Первое и самое важное - безопасность людей.
- Сбои могут возникнуть из-за ошибки пилота , аппаратного или програмного сбоя.
- У вас должно быть достаточно силы тяги
- а) Если вы не справляетесь с управлением , автопилот может потребовать больше тяги , чем доступно иначе это приведёт к потери стабилизации полета.
- б) в идеале мультикоптер должен взлетать при 50% стика газа.
- 3) Во время обучения полетами не рекомендуется использовать дорогостоящих, жестких , острых карбоновых деталей (пропеллеров и рамы).
- а) это будет более дешевый, мягкий, хрупкий пластиковый пропеллер и рама.
- б) карбон и стекловолокно не поддаются разружению, это может быть небезопастно при контакте с чем-либо.
- 4) Если вы летаете рядом с людьми - вы их ставите под угрозу.
- а) будте уверены, что есть безопасное растояние между вами и зрителями.
- б) вам нужно понимать что для вас является безопасное растояние для вас и окружающих.
- в) по крайней мере это не ближе 3 метра , но не дальше 10м.
- г) держите всех людей дальше от летательного аппарата
- д) убедитесь, что никто не находиться между вами и аппаратом
- е) зрители должны быть позади пилота
- ж) если кто-то нарушает безопасную зона полета - сажайте летательный аппарат и ждите пока не освободиться пространтсво для безопасного полета.
- з) при полном газе средний мультикоптер может развить скорость в 32км/ч , может подняться на сотни метров и улететь на далекие растояния.
- 5) всегда будьте уверены, что кабель батареи не подключен к основной плате , пока вы не готовы к полету.
- а) всегда включайте передатчик и убеждайтесь, что ручка газа находиться в нулевом положении
- б) после приземления первое, что вы должны сделать - это отключить питание!
- в) не выключайте передатчик, пока вы не обесточили аппарат.
- г) всегда снимаейте пропеллеры если вы тестируете или настраиваете аппарат. друзья и ваше лицо будут вам благодарны
- д) когда батараея подключена всегда опасайтесь того, что двигатери вооружены, проверяйте это быстрой подачей газа.
- е) не подбирайте аппарат и не берите в руки аппаратуру во избежание случайного поданого газа.
- ж) не пытайтесь летать больше, чем позволяют ваши батареи, сохраняйте для базопасности мощность иначе это может привести к аварии и нехватке мощности на вираже.
- 6) В APM полетном контроллере используется функция постановки на охрану (arming)
- а) перед полетом после того, как вы подключили батарею на аппраратуре ручка газа должна быть нажата вниз и вправо на несколько секунд, что бы снять с орханы двигатели.
- б) после посадки ваше перое действие должно быть постановка на охрану - ручка газа вниз и влево в течении нескольких секунд. после этого можно проверить постановку на охрану путем небольшого перемешение ручки газа вверх и сразу же вниз.
- в) когда вы поставили двигатели на охрану (disarming) ручку газа все равно требуется держать в нуле.
- 7) учитесь переключать режимы из стабилизации в другие и обратно.
- а) это самая хорошая практика
- б) В режим стабилизации может быть добавлени Simple mode , для лучшей практики, если вы испытываете трудности.
- в) не используйте другие режимы, кроме Стабилизации (Stabilize) и Simple Stabilize пока вы не научились в них достаточно хорошо летать.
- 8) Важно помнить , что при первой аварии, неправильной посадки или неизвестного вам состояния полетного контроллера необходимо:
- а) бросить полотенце на пропеллеры, так как они могут начать крутиться неожиданно.
- б) сразу отключайте аккумулятор
- в) большое полотенце важная часть для обеспечения безопасности с огнетушителем и аптечкой.
- г) лучше использовать первое средство, чем сразу последнее.
- 9) при тестировании или полетах по любым точками в режиме навигации используя GPS
- а) убедитесь, что ваш GPS смог поймать необходимое количество спутников и перейти в состояние LOCK (3d fix) перед снятием охраны (arming) и взлётом
- б) убедитесь, что ваша домашняя точка в ПО Mission Planner установленна правильно.
- в) Если GPS не смог коректно установить домашнюю точку, перезагрузитесь и подождите когда будет поймано более 8 спутников и проверте домашнуюю точку снова.
- 10) Знайте законы
- а) Наш личный опыт использования мультикоптеров является постоянно под атакой тех, кто боится “дронов” и вторжение в их частную личную жизнь. Если вы нарушаете закон, или вторгаетесь в чьюто личную жизнь - готовьтесь отвечать по закону. Пожалуйста понимайте наши законы и летайте не нарушая их.
- б) найдите ближайшую любительскую группу людей, которые занимаются полетами и поинтересуйтесь у них о законности полетов в разных местах. Они с радостью смогут вам показать специальные отведенные места, которые не нарушают чьи-то правда, где вы можете обмениваться опытом и получать удовольствие от полетов.
Самое главное: соблюдайте безопасную дистанцию между вашим аппаратом и людьми.
Советы которые смогут помочь защитить ваш аппарат от повреждений
- 1) избегайте резких и экстремальных полетов
- а) перемещайте стики плавно и не дёргайте их.
- б) если аппарат хорошо сбалансирован и настрое, то он потребует небольшое отклонение стиков, в отличии от “плавающих” и “кривых” аппаратов.
- 2) аппарат должен быть более менее стабильным в горизонтальной плоскости и не иметь дополнительных тримов с аппаратуры.
- а) если коптер “гуляет” в полете, вам прийдется отримировать его с аппаратуры.
- 3) будьте осторожны при подаче большого газа , так как аппарат может получить или потерять высоту (просадка батареи по мощности и нехватка газа на моторы с отключением мозгов и их перезагрузкой).
- 4) так как мультикоптеры симметричны вам очень лего дизарентироваться и потерять его в ориентации.
- а) для ручных полетов ориентация является важной частью для полетов, следите за ней
- б) во время обучения сохранайте орентацию аппарата с момента взлета и контролируйте её.
- в) рекомендуется по началу летать на растояние не более 10м но и не ближе , чем 3 м к себе.
- г) если вы отлетаете дальше чем 30 метров, то очень легко потерять ориентацию в пространстве - это может привети к аварии.
- д) если вы потеряли осевую ориентации (Yaw) во время полета, то попробуйте в режиме стабилизации лететь вперед и спользуя повоторы вокруг оси направлять его как автомобиль.
- е) это гораздо лучше, чем просто спуститься на землю не понимая орентацию, еще хуже - улететь.
- ж) отлетая часто получается , что наклоняя аппарат назад к пилоту вы видете , что он может отдаляться - это происходит из-за потери ориентации.
- з) Результат этого - аппарат улетает и разбивается.
- 5) всегда имейте режим стабилизации на аппаратуре.
- 6) порывы ветра могут сделать полет значительно труднее
- а) сильный ветер может препядствовать движению аппарата или вовсе загрутить его вокруг.
- б) чем выше вы находитесь на местносте , тем больше вероятность сильных ветров.
- в) переключение в режим Стабилизации и посадка позволит вам сохранить аппарат перед тем, как у вас появятся новые навыки пилотирования
- г) Избегайте высоких и скоростных полетов в разных режимов пока не появилась значительная увереность в пилотировании.
- д) при полете вокруг деревьев очень легко потерять визуальный контакт и ориентацию
- е) порывы ветра вокруг объектов, зданий, сооружений могут усугубить пилотирование
- ж) потеря радиосигнала тоже вероятна и может произойти в неподходящий момент.
- з) если ваш аппарат приближается к потенциальной помехе, то следует переключиться на режим стабилизации и вернуть его к себе.
- 7) Ardupilot конкретные спобобы безопасности: RTL, FailSafe , GeoFence
- а) RTL может обеспечить безопасное возращение к месту запуска, если он получит команду от вас.
- б) настройка FailSafe на радиомодуле может быть выполнена командами RTL или Auto Land , что бы сохранить аппарат и предотвратить от травм себя и окружающих.
- в) GeoFence устанвливает автоматический периметр, который заставит аппарат оставаться в безопасном месте.
- г) Не следует пологаться на выше указаные режимы для обеспечения безопасности, у вас всегда должна быть мысль о переводе аппарат в режим стабилизиции и переход в ручное управление, если что-то пойдёт не так.
- д) особенно не пологайтесь на эти режимы выполняя обучение или какие-либо другие маневры.
- е) эти режимы являюся дополнением и не являются заменой в безопасности
- 8) о первом взлете или о настройки контроллера
- а) в режиме стабилизации двигайте стик газа медленно, пока аппарат не зависнет
- б) если аппарат пытается перевернуться - опустите газ и устраните проблемму.
- в) двигатели могут быть настроены в неправильном направлении (см. схемы подключения)
- г) могут быть неправильно установлены пропеллеры
- д) если аппарат пытается крутиться вокруг своей оси или улететь в некотором направлении
- е) передатчик или настройки аппаратуры могут быть не правильными
- ж) двигатели или регуляторы могут быть настроены не правильно
- з) не правильные пропеллеры могут быть надеты не правильно на моторы и) если аппарат не может висеть стабильно над землей на уровне 2м то стоит решить эту проблему.
- 9) при полете FPV (вид от первого лица) с видеокамерой , вы должны иметь режимы: стабилизация , simple mode и RTL
- а) убедитесь, что RTL работает правильно перед использованием FPV
- б) используйте режим стабилизации при FPV полетах
- в) Если видеосвязь FPV прервалась вы можите переключить на simple mode или RTL для возращения домой.
- 10) убедитесь, что Ваш аккумулятор закреплен надежно
- а) используйте крепление-липучки
- б) можно использовать вклеенну поддержку для батареи для лучшего держания липучки.
Краткое руководство пользователя для готового к полетам коптера (RTF)
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
установите Mission Planner
перейдите на страницу загрузки и выберите самую последнюю версию.
Скачать Mission Planner последней версии
установите программу
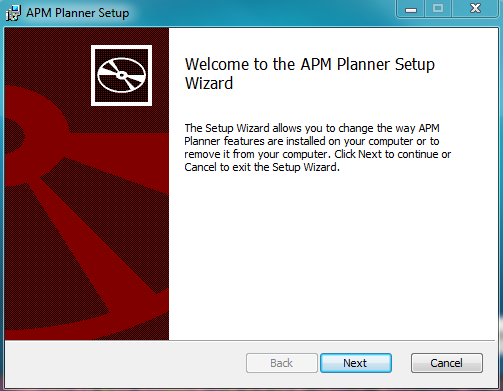
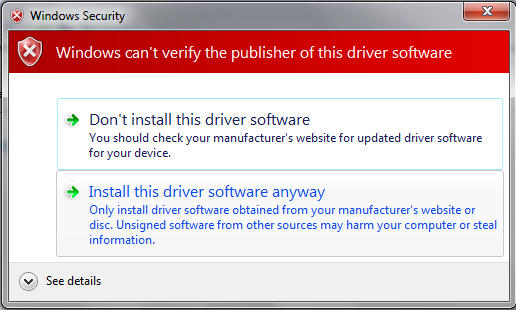
Следуйте инструкциям до завершения установки программы. В процессе установки программа автоматически установит необходимые драйвера. Если у Вас возникает ошибка DirectX , то необходимо его обновление. Если вы получаете предупреждение, как показано на картинке ниже, выберите Установить драйвер для продолжение установки программы.
После установки программы запустите её, она автоматически информирует вас , если есть обновления. Пожалуйста используйте по возможности самую последнюю версию Mission Planner
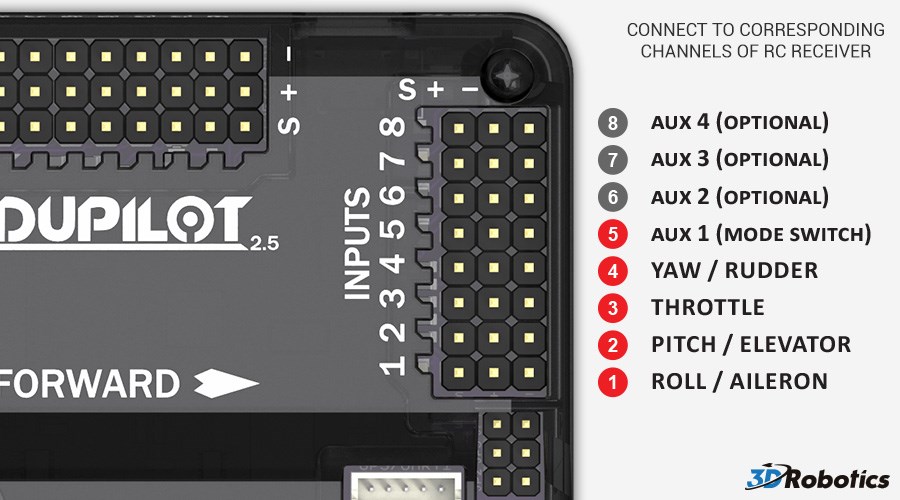
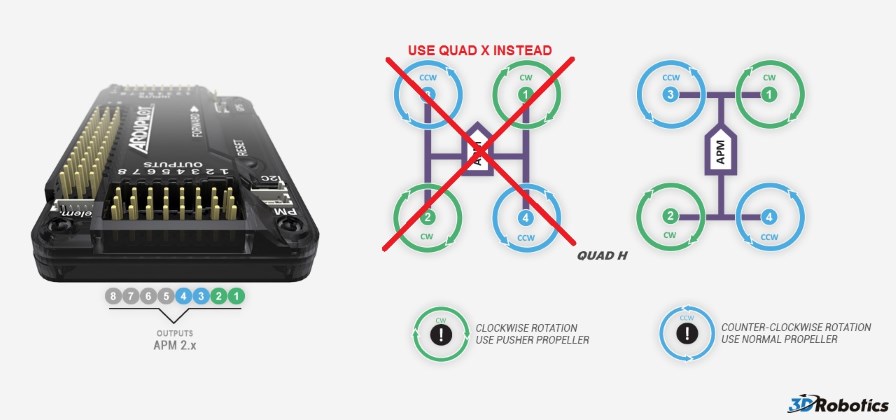
подключите радиоприемник: PWM или PPM сигналы
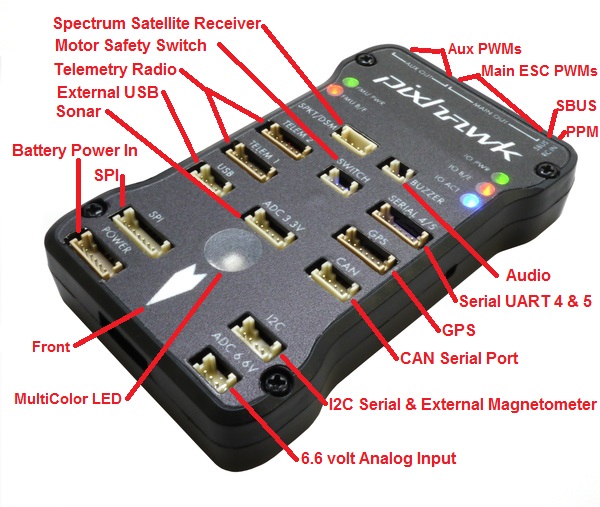
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
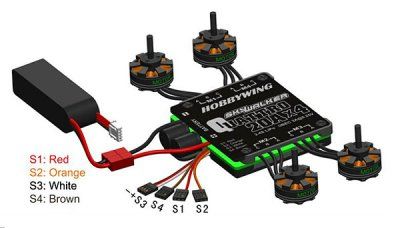
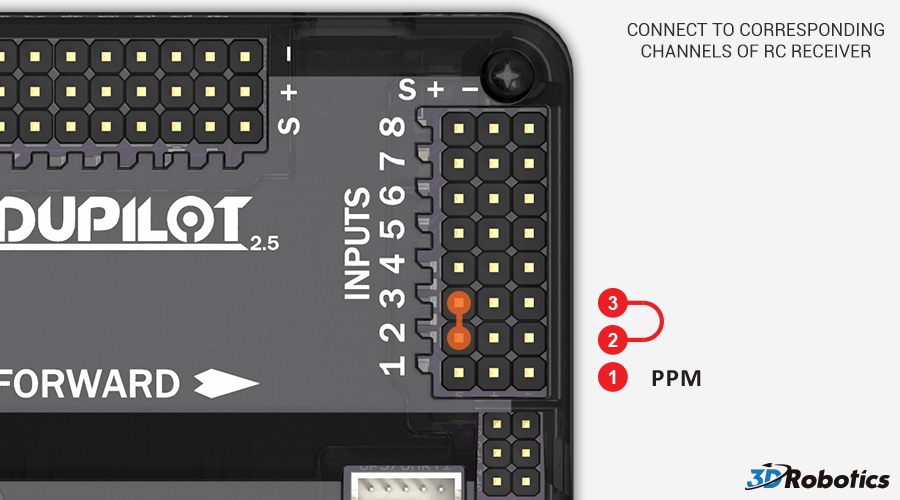
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод. Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

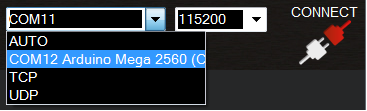
После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
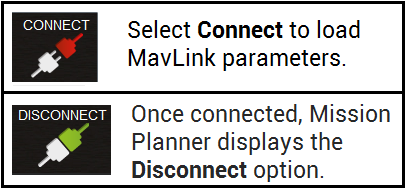
Выберите “соединение” в правом вверхнем углу экрана , что бы загрузить параметры MAVLINK в APM , Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.
Включите передатчик и убедитесь, что он в режиме самолета (Полетному контроллеру необходим режим полета , независимо от платформы на эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw), правая будет контролировать крен (Roll) и тангаж (Pitch) . Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” , нажмите на “калибровка” и правом нижнем углу, Mission Planner выведет окно, что батарея не должна быть подключена , как и моторы с пропеллерами.
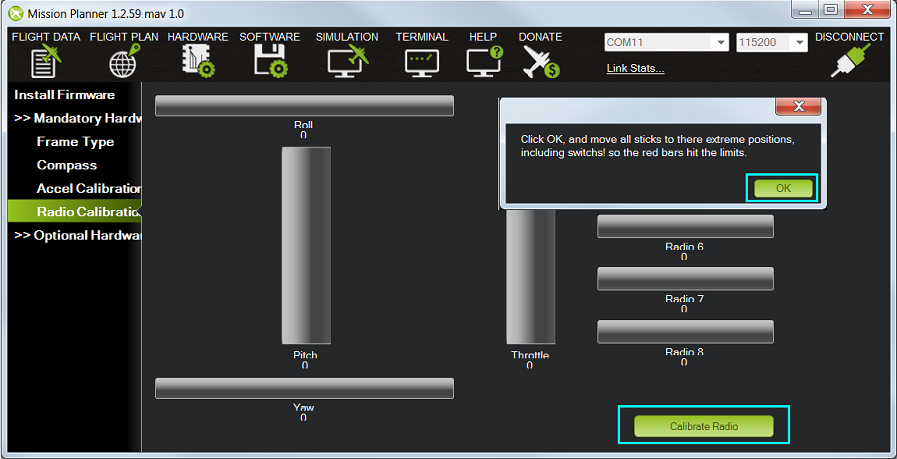
Нажмите “ок” и начните двигать стиками в каждую из сторон до предела, а так же трехпозиционный тумблер. наблюдайте за результатами, красные линии установят пределы минимамльного и максимального значения вашего радиопередатчика.
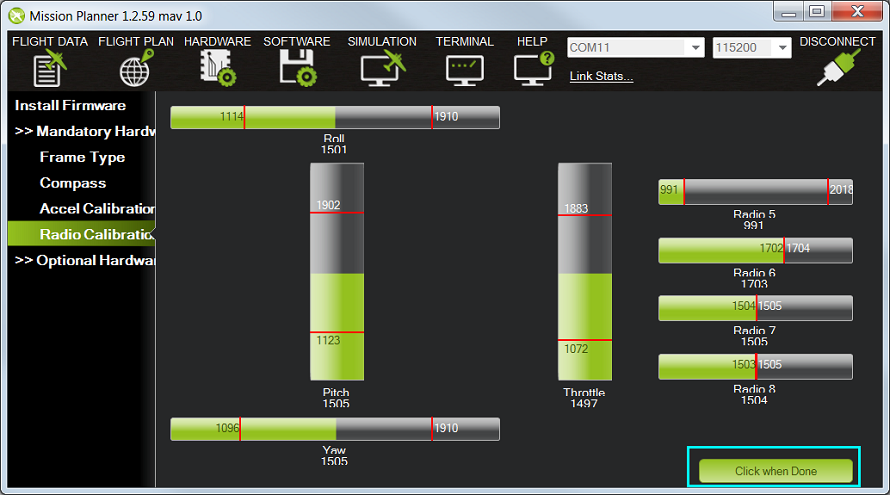
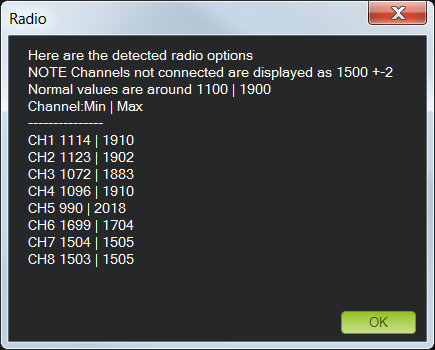
Когда все значения каналов радио смогли показать свой минимум и максимум нажмите в программе “Done”. Данные вам отобразятся в отдельном окне, нормальное значение около 1100 для минимума и 1900 для максимума.
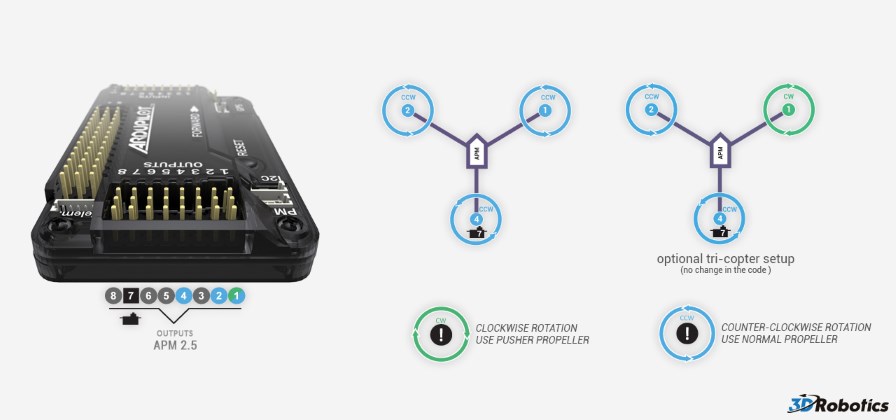
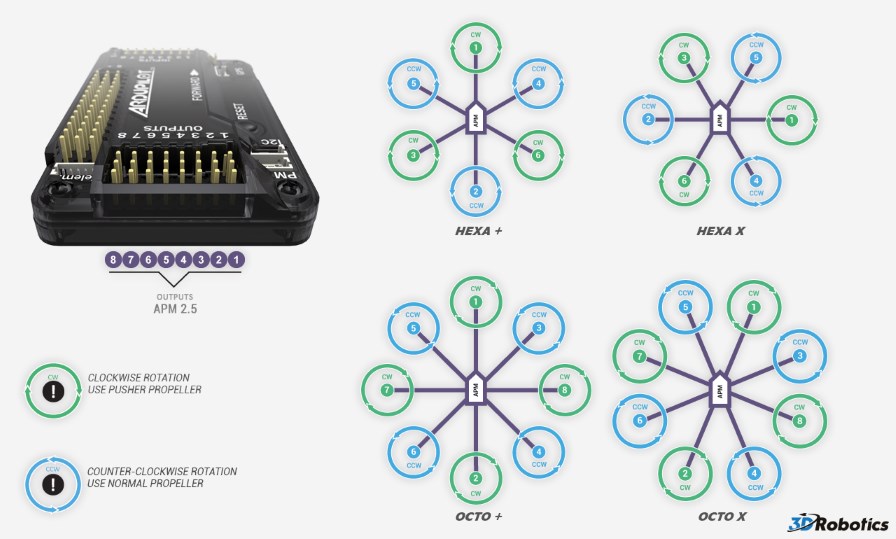
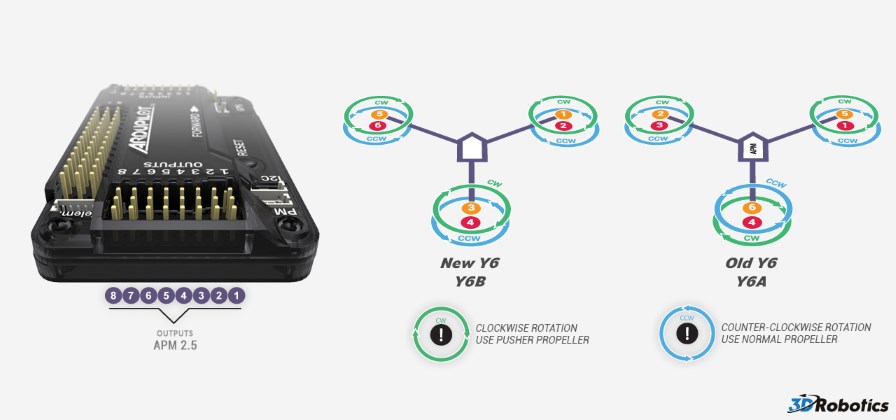
Крепление пропеллеров
Винты должны быть прекреплены в соотвествии с конфигурацией, они устанавливаются в самую последнюю очередь , после того, как все настроено. ниже приводится схема и направление пропеллеров и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus
 Конфигурация квадрокоптер H рама
Конфигурация квадрокоптер H рама
 Конфигурация трикоптер
Конфигурация трикоптер
 Конфигурация гексакоптер и октакоптер
Конфигурация гексакоптер и октакоптер
 Конфигурация трикоптер Y6
Конфигурация трикоптер Y6
 Конфигурация квадрокоптер X8
Конфигурация квадрокоптер X8

Предполетная информация
Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами. Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи. Прочтите вики раздел "первый полет" по снятию с охраны (arming) и постановке на охрану (disarm) квадрокоптера, так же по управлению и вариантам полетов.
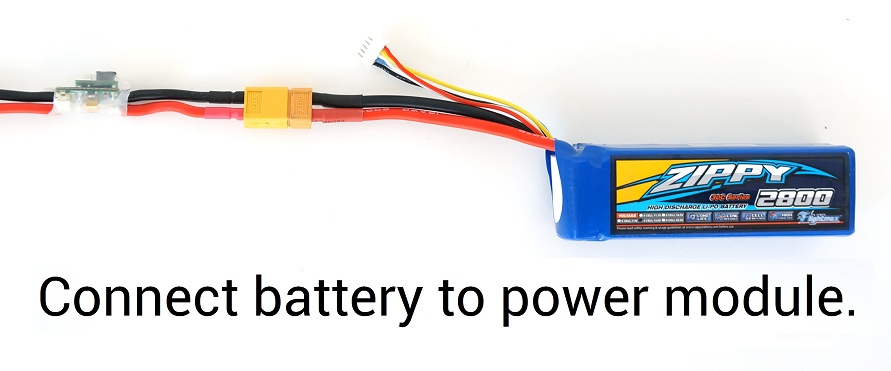
Когда все готово для полетов , установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте безопасному снятию с охраны, что бы это не повлекло "сумашедший полет" (вики)
Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)
Следующие шаги
Постепенно изучайте беспилотные полетные режимы, для получение всех возможностей от ArduCopter, включая режимы Loiter и полет по точкам
Изменения прошивки ArduCopter 3.0.х для конфигурации квадрокоптер для APM 2.6 (2.5)
Форум позволяет разработчикам отвечать на Ваши вопросы, а также позволяет исследовать аналогичные ситуации. Пожалуйста, выберите подфорум, который наиболее вам подходит для вики-страницы и вопросов, которые вам интересны.
ArduCopter 3.0.1 готов для широкого использования. Был выпущен и теперь доступен в Mission Planner (раздел прошивка) другие ссылки:: firmware.diydrones.com , GitHub и новой Downloads Area .
Предупреждение № 1: калибровка компаса и снижения помех является гораздо важным, чем с 2.9.1b
Предупреждение # 2: GPS сбои могут вызвать внезапные и агрессивные изменения позиций в режиме LOITER (слоняться/замри). Вы можете уменьшить LOITER (слоняться) PID P до 0,2 (с 1,0), чтобы уменьшить агрессивность (см. рисунок ниже, где этот пункт можно найти в Mission Planner).
Предупреждение # 3: Оптический датчик Optical Flow не поддерживается, но вернется в следующей прошивке (AC-3.0.2 или AC-3.1.0).
Предупреждение № 4: LOITER (слоняясь) по сторонам не удерживается высота. Эта ошибка будет исправлена в AC-3.0.2.
Предупреждение № 5: Эта версия прошивки мало протестированна для традиционных вертолетах.
Улучшения по сравнению с 2.9.1b включают в себя:
- Инерциальная навигация для режима LOITER (слоняться) и Auto дает более точное управление (Рэнди, Леонард , JonathanC ).
- 3D навигационный контроль реализован следующим образом: прямые линии во всех измерениях между путевыми точками ( Leonard , Рэнди)
- Параметры : WPNAV_SPEED, WPNAV_SPEED_UP, WPNAV_SPEED_DN, WPNAV_ACCEL позволяют настроить скорость и ускорение в ходе маршрута
- "Compassmot" для компенсации помех на компас с полетного контроллера, моторов, регуляторов скорости (ESC) и батареи. (Рэнди, JonathanC ) (Настройка видео здесь )
- Улучшения безопасности:
- простая форма (виртуального забора) Geo Fence
- предварительная проверка проверяет все калибровки перед снятием с охраны (arming) (можно отключить, установив ARMING_CHECK к нулю). (Видео описание здесь )
- безотказный (failsafe) GPS - переключается на режим LAND (посадка), если GPS теряется в течение 5 секунд
- улучшения стабильности, чтобы остановить быстрые подъемы в очень мощных и тюнингованых вертолетах
- Улучшения режима Круг (CIRCLE) включает режим "Панорама", когда CIRCLE_RADIUS установлен в ноль (Рэнди, Леонард )
- Параметр SONAR_GAIN добавлен, чтобы позволить более лучше настраивать отслеживания поверхности гидролокатора
- CH8 вспомогательный переключатель (те же функции, как CH7)
- работает на PX4 (некоторые незначительные особенности еще не доступен) ( картридж , путь )
Как обновить:
- 1. Убедитесь, что вы используете Planner Миссия 1.2.59 или новее (получить его здесь )
- 2. Нажмите на Initial Setup в Mission Planner, выберите раздел Firmware. Номер версии должен появиться как "ArduCopter-3.0.1", а затем нажмите соответствующий значок рамы, и он должен обновить как обычно.
- 3. Уменьшить LOITER (слоняться) и Alt Hold (Держать высоту) PIDs, если были изменены их значения от значений по умолчанию. Измененные значения PID для APM можно увидеть на изображении ниже.
- 4. Информация: если вы приобрели APM до марта 2013 года, обновить PPM энкодер до последней версии. (инструкции здесь ).
- 5. Попробуйте новую версию сначала в режиме Stabilize (стабилизация), а затем Alt-Hold (удержание высоты), потом LOITER (слонятся) и наконец RTL (Возврат на точку старта) и Авто.
Примечание: параметры Nav были объединены с LOITER (слоняться) так что не беспокойтесь, если вы их не найдете.
Отдельное спасибо Марко , DaveC и остальным бета-тестерам своих квадрокоптеров на период тестирования.
Все отзывы приветствуются. Пожалуйста, поставьте Ваши вопросы, комментарии (хорошие и плохие!) Ниже.
Добавил Крейг:Пожалуйста, посмотрите видео Рэнди по настройке и полетам квадрокоптера ArduCopter 3.0, прежде чем идти летать. Они отличные!
AC 3.0 "Живой" Компас Калибровка
AC 3.0 "Забор" зона для полета
Изменения прошивки ArduCopter 3.1.х для конфигурации квадрокоптер для APM 2.6 (2.5)
После нескольких месяцев тестирования ArduCopter 3.1, наконец, она доступна в Planner Миссия и GitHub .
Предупреждение № 1: Моторы будут вращаться (медленно) по умолчанию, как только квадрокоптер будет снят с охраны (arming)! Вы можете поменять эту функцию, установив параметр MOT_SPIN_ARMED в ноль.
Предупреждение № 2: если вы видите "Bad Gyro" на данных телеметрии то у вас скорее всего сгорел регулятор напряжения 3.3V .
Предупреждение № 3: если вы используете датчик гидролокатора (SONAR) установите параметр SONAR_GAIN до 0,8 или ниже
Основными улучшения по сравнению с ArduCopter 3.0.1 являются (полный список здесь ):
- поддержка контроллера Pixhawk
- автонастройки (autotune) крена (Roll) и тангажа (Pitch) (Леонард / Рэнди)
- Новый режим Дрифт (Drift) (Джейсон)
- Улучшенный Acro и новый режим Спорт (Sport) (Леонард)
- Снятие с охраны (Arming), Взлет (Take-off), Cлоняться по земле (Land in Loiter) или удержание высоты (AltHold)
- классические вертолеты (TradHeli) улучшения (Роб) в том числе:
- поддержка прямого привода хвостового ротора
- более гладкий разгон главного ротора
- уменьшается "коллектив" для лучшего контроля в режиме стабилизации (STAB_COL_MIN, STAB_COL_MAX ПАРАМЕТРЫ)
- 7. Поддержка SingleCopter (Билл Кинг)
- 8. Повышение производительности режима Alt-Hold для Hexa & Octacopters
- 9. Улучшения безопасности:
- а) обнаружения внезапного отказа GPS (Рэнди)
- б) Двигатели вращаются, когда снята охрана (armed) (Джонатан Challinger)
- в) Обнаружение крушения - выключаются двигатели, если аппарат перевернулся на 2secs
- г) Срабатывания защиты (FailSafe) - (вернуться на точку старта) RTL вместо LAND (посадки), обнаружение отказа GPS - переход в режим AltHold (удержание высоты) вместо LAND (посадка)
- е) больше предварительных проверок (pre-arm) - добавление проверки инерциальной скорости
- 10. Исправления:
- а) Датчик Optical Flow (оптического потока) снова работает (хотя производительность все еще не велика, потому что не интегрирована с инерциальной навигацией)
- б) работа ROI (область слежения) (используйте команду DO_SET_ROI)
Как обновить:
Выберите Initial Setup в Mission Planner , кликните по Firmware. Номера версий должны появиться как "ArduCopter-3.1", а затем нажмите соответствующий значок конфигурации и прошивка обновиться, как обычно.
Отдельное спасибо Марко и многим бета-тестерам ArduCopter 3.0.1 ветки, которые ставят свои аппараты в опасность во время тестирования этой новой версии и находят много проблем, которые вы не должны испытать!
Обновление прошивки ArduCopter 3.2 от 25.11.2014
После нескольких месяцев свершился релиз новой проишвки, которая претерпела значительное изменения, которые коснулись:
Arducopter 3.2 (известная еще как APM:Copter) была выпущена как версия по умолчанию в замен 3.1.5. Это тот же вариант, что мы предлагали узкому кругу пользователей две недели назад для проверки. Если вы желаете использовать версию 3.1.5 дальше , вы можете её загрузить через "Pick previous firmware" в ПО Mission Planner.
Полный список изменений доступен на гитхабе, но вот основные моменты:
Улучшеные полетные режимы:
- Режим PosHold: по аналогии с Loiter, но с прямой реакцией на команды пилота репозиционирования
- Режим ACRO: улученая обработка вращения EXPO (для более быстрого вращения)
- Режим Drift: теперь использует помощь дросельной заслонки (как в режиме AltHold)
- Плавные переходы между полетными режимами (т.е. когда вход в RTL или Loiter на высоких скоростях движения квадрокоптера)
Улучшение Миссий и исправления:
- Более огибаемые точки - Spline Waypoint
- Исправление Do_Jump, Conditional_Distance, Conditional_Delay
- Do_Set_ROI теперь сохраняется на протяжении всех точек
- Condition_Yaw принимает относительное носовое направление (т.е. текущий курс + 20)
- Сброс горизонтальной точки позиционирования при взлете в режме AUTO, что бы избежать неадекватного поведения во время дрейфа GPS
- Ралли точки теперь только в Pixhawk
Новые датчики:
- Lidar-Lite Range Finder, SF02, MaxBotix I2C sonar and Analog sonar (который отсуствует для Pixhawk)
- EPM Gripper - магнитная держалка груза, удобна при доставке и сцепки
Особенности безопасности:
- EKF/DCM проверка будет переключаться в режим LAND, если головное положение более 60 градусо за 1 секунду
- Добавление обнаружение глюка датчика барометра
- Pre-arm (предвзлетная) проверка успешности калибровки гироскопа
- Pre-arm (предвзлетная) проверка внутренних и внешних датчиков : гироскопа, акселерометра и компаса между собой (для Pixhawk)
- Поддержка парашюта (только Pixhawk)
- Обратная связь с пилотом когда идет взлет в режиме AltHold, Loiter, PosHold (т.е. моторы слабо крутятся , когда дросель поднят)
- EKF (новая система оценки высоты и положения используется только для справки в этом выпуске)
Исправление багов:
- Pixhawk GPS драйвер мог быть переполнен и приводить к пропуску сообщений GPS положения
- Pixhawl i2c ошибка, которая могла заморозить данные, когда много по ней помех (шума)
Известные проблемы и предупреждения:
- Владельцам Pixhawk при обновлении этой прошивки требуется произвести перекалибровку компасов
- Полетный режим PosHold не будет отображаться на экране Mission Planner если она (программа) старой версии, пожалуйста обновите Mission Planner
- Алгоритм обнаружение посадки стал более строгим, теперь при посадке в режимах RTL и AUTO потребуется больше времени для постановки на охрану (disarm)
- Если у вас достаточно мощный квадрокоптер (когда соотношение суммы тяги двигателей больше чем в два раза веса самого квадрокоптера) вам необходимо THR_MID установить как нужно иначе из-за "обратной связи с пилотом" поднимает газ на половину значения THR_MID (cм. выше)
- Вектор прохождения точки может заставлять дергаться квадрокоптер, если WPNAV_SPEED больше 500
- Прекращена (убрана) поддержка NMEA и SIRF GPS для плат ArduPilot (высвобождение места)
- Прекращена (убрана) поддержка Sonar для мультикоптеров на APM version 1 и Традиционных вертолетах на APM v1 и APM v2 (Для высвобождения места под другой код)