Первый полет (First Flight)
Первый полёт (First Flight)
Полет по точкам и выполнение миссий (AUTO)
Возврат домой (Return to launch)
Полет на указанную точку (Guided)
Простой и супер простой режим (Simple / Super simple)
Предполетная проверка безопасности Pre-Arm
Постановка на охрану и снятие с охраны
Первый отрыв от земли - советы для новых пилотов
Тюнинг крена и тангажа (Roll and Pitch)
Установка середины газа (дросельного газа)
Первый полёт Arducopter
В этом разделе есть информация , которую вы должны знать для первого полета, а так же некоторые базовые настройки конфигурации, что бы квадрокоптер достаточно хорошо летал. Пожалуйта, следуйте по каждой ссылке указаной ниже:
- Настройка полетных режимов
- Стабилизация (Stabilize)
- Удержание высоты (AltHold)
- Акробатика (Acro)
- Полет по точкам и выполнение миссий (AUTO)
- Слонятся (Loiter & OF_loiter)
- Автоматическая посадка (Land)
- Возврат домой (Return to launch)
- Полет на указанную точку (Guided)
- Простой и супер простой режим (Simple / Super simple)
- Полет по кругу (Circle)
- Режим самолета (Drift)
- Следуй за мной (Follow Me)
- Позиция с ручным газом (Position)
- Спорт (Sport)
- Светодиоды APM и их значение
- Предполетная проверка безопасности Pre-Arm
- "Пробуждение" - Постановка на охрану и снятие с охраны (Arming Disarming)
- Первый отрыв от земли - советы для новых пилотов
- Тюнинг крена и тангажа (Roll and Pitch)
- Измерение уровня вибрации
- Установка среднего газа дроссельной заслонки
- Сохранение значений трима и Авто-трим
- Тестирование Радиоаппаратуры
- Полетные тесты
Некоторые из этих настроек расматриваются в этом видео "проверка первого полета".
Все указанное выше выполнено? Тогда вы должны быть готовы для расширенной конфигурации или перейти прямо к Автономным полетам!
Настройка полетных режимов
У полетного контроллера ArduPilot в конфигурации ArduCopter APMCopter есть 14 полетных режимов, 10 из которых регулярно используются. Вы можете настроить их , выполнив следующие действия:
- Включите аппаратуру
- Подключите APM к ПО Mission Planner
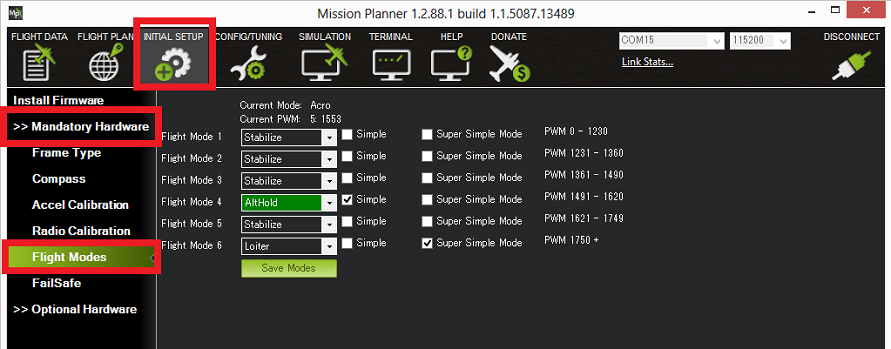
- Зайдите в раздел Initial Setup -> -> Flight Mode
- 5-й канал вашего передатчика отвечает за полетные режимы, зеленая полоса в ПО указывает текущий режим, при переключении на аппаратуре зеленая полоса будет перемещаться.
- Используя выпадающий список в каждом положении выберите полетный режим. По крайней мере один из режимов должен быть режим Стабилизации (Stabilize)
- При желании можно установить галочку Simple напротив каждого из режимов. В прошивке 3.1 и выше можно установить галочку "супер простой режим". Если будут установлены галочки на "простом" (Simple) и "Супер простом режиме" (Super Simple Mode) то будет использоваться "супер простой режим" (Super Simple Mode).
- Когда режимы установлены нажмите кнопку сохранения расположеную чуть ниже.
Когда вы начинаете использовать ArduPilot в конфигурации ArduCopter вы должны прогрессировать через полетные режимы в порядке указанном ниже, будучи уверенным, что вы знакомы с текущем перед переходом к следующему. Нажмите на любой из режимов полета ниже для детальной информации о нем:
- Стабилизация (Stabilize)
- Удержание высоты (AltHold)
- Слонятся (Loiter & OF_loiter)
- Вернуться на точку старта (RTL)
- Автоматический (Auto)
Дополнительные режимы полета
- Акробатика (Acro)
- Полет по кругу (Circle)
- Режим самолета (Drift)
- Следуй за мной (Follow Me)
- Спорт (Sport)
- Полет на указанную точку (Guided)
- Позиция с ручным газом (Position)
- Автоматическая посадка (Land)
- Простой и супер простой режим (Simple / Super simple)
Большинство аппаратур имеют 3х позиционный переключатель, но вы можете ознакомится с инструкцией по настройке 6-типозиционного переключения.
Если вы не хотите использовать Mission Planer вы можете установить полетные режимы через интерфейс командной строки CLI
С небольшими изменениями кода по настройке пользовательских полетных режимов, которые комбинируются с существующими режимами полета - описано в разделе для разработчиков
Режим стабилизации (Stabilize mode)
Режим стабилизации наиболее часто используется в конфигурации прошивки ArduCopter. Эта страница даст советы и варианты настроек по полетам в этом режиме.
Обзор режима
- Углы наклона контролируются пилотом стиком наклона на аппаратуре. Когда стик наклона крена и тангажа (Roll and Pitch) отпускается происходит автоматическая стабилизация по уровню горизонта
- Пилоту требуется регулярно регуляровать наклонами квадрокоптера, что бы удерживать его на месте под воздействием ветра.
- Пилот управляет рысканьем (Yaw, Rudder) (повоторы по часовой стрелке и против) для изменение положения головы. Когда стик отпускается направление по ходу движения будет поддерживаться на измененом уровне.
- Дроссельной заслонкой (Стик газа, Throttle) пилот регулирует обороты двигателя, требуется постоянная корректировака стиком газа, что бы поддерживать высоту. Если стик газа убрать в минимум , то сработает параметр (MOT_SPIN_ARMED - параметр, определяющий скорость моторов при снятии с охраны - "arming" ) и если апарат находился в полете то он потеряет управление ориентацией и упадет.
- Регулировка газом происходит автоматически на основе угла наклона (т.е. увеличивается как только происходит наклон), что бы уменьшить компенсацию пилот должен следить за высотой квадрокоптера.
- В прошивказ 3.0.1 и более ранних версиях квадрокоптер можно было снять с охраны только в режимах стабилизации и ACRO.
Внимание: Настоятельно рекомендуется освоить полет в режиме стабилизации, чем переходить сразу к другим режимам. Пилот всегда сможет легко и быстро переключиться в режим стабилизации из других режимов полета в случае неожиданного или нежелательного поведения в полете.
Настройка
- Параметр ANGLE_MAX задает максимальй угол наклона, который по умолчанию равен 4500 (т.е. 45 градусов)
- Параметр ANGLE_RATE_MAX задает максимальную запрашиваемую скорость вращения в крена и тангажа, который по умолчанию равен 18000 (180deg/sec).
- Параметр ACRO_YAW_P управляет тем, как быстро аппарат вращается на основе поступающих команд рыскания от пилота. По умолчанию равно 4,5 задаёт скорость 200 град/сек вращения, когда команда стиком удерживается полностью влево или вправо. Большие значения сделают его вращаться быстрее.
- Параметры стабилизации по крену и тангажу (параметр Roll P / Pitch P) реагируют на крен и тангаж которые задает пилот и ошибки между желаемым и фактическими углами крена и тангажа. По умолчанию параметр равен 4,5 будет задавать 4.5 град/сек скорость вращения для каждого одного градуса погрешности в угле.
- Чем выше значение Р тем быстрее аппарат будет наклонятся, чтобы получить нужный угол.
- Высокий P вызывает на аппаратах колебания взад и вперед, как на качелях - несколько раз в секунду.
- Низкий P вызовет медленные движения. Очень низкий P не даст чувтсвовать аппарат и может привести к аварии под влиянием ветра.
- Коэффициенты Roll/Pitch P, I и D - это термины контролирования двигателей на основе требуемой скорости вращения для стабилизации (т.е. угловой стабилизации) контроллером. Эти термины, как правило, связаны с отношением мощности к весу аппарата. более мощные аппараты требуют более низкие значения PID. Например квадрокоптер, который ускоряет очень быстро, возможно, придется установить параметры Roll/Pitch P равным 0,08 в то время как более вялым аппаратам можно использовать 0,18.
- Коэффициент Roll/Pitch P является наиболее важным параметром для настройки вашего квадрокоптера.
- Чем выше P тем сильнее отзывчивость мотора для достижения желаемой скорости поворота.
- По умолчанию Р = 0,15 для стандартного Arducopter (450 класс рамы).
- Коэффициент Roll/Pitch I используется для компенсации внешних сил, которые мешают аппарату поддерживать нужную скорость в течение длительного периода времени.
- Высокий коэффициент I позволит быстро нарастить и быстро снизится до нужного коэффициента, что бы избежать перерегулировки.
- Коэффициент Roll/Pitch D предназначен, что бы ослабить реакцию аппарата к ускорениям в заданых направлениях желаемого положения.
- Высокий параметр D может привести к необычной вибрации и эффекту "памяти", когда чуствительность медленная или вовсе не реагирует.
- Эти значения столь низкие как 0,001 и высокие чем 0,02 - используются в завасимости от аппарата.
Смотрите AC2_attitude_PID для получения более подробной информации по настройке.
Прошивка конфигурации ArduCopter 3.1 и выше включает режим AutoTune , которая позволит вам автоматически определить лучшую стабилизацию и значения PID.
Проверка производительности из флеш памяти полетного контроллера
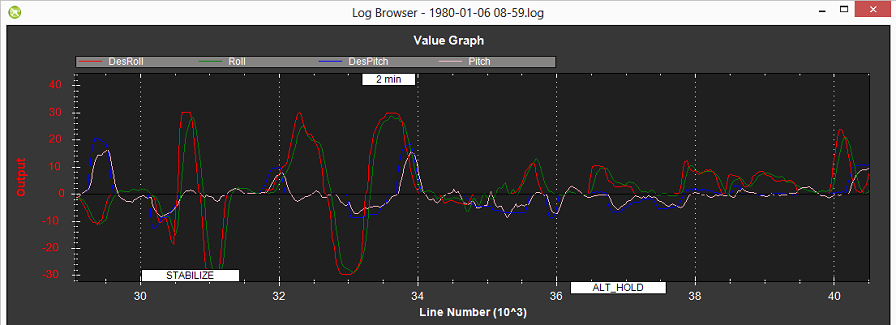
Просмотр режима стабилизации производительности лучше всего сделать, скачав журнал данных с вашего полетного контроллера, затем откройте его с помощью Mission Planner и визуализируйте параметры Roll-In или DesRoll (нужный пилотный угол крена) с Roll (фактический угол) и Pitch-In или DesPitch (требуемы угол тангажа) с Pitch (реальный угол наклона). Эти два совмещенных параметра должны отслеживать хорошо, как показано ниже.
Общие проблемы
- Новый аппарат делает сально сразу же после взлета - это обычно вызванно неправильным подключение двигателя или неправильными пропеллерами (двигатель крутиться по часовой, а пропеллер расчитан на противочасовое движение) проверьте правильность подключения двигателей для вашего APM.
- Аппарат качается по осям крена и тангажа (влева, вправо, назад и вперед для квадрокоптеров) - это обычно означает, что неверные коэффициенты P. смотрите раздел выше о том, как настроить это.
- Аппарат качается при спуске быстро - это вызвано провалами у меняющейся скорости пропеллеров и почти невозможно подстроить, хотя повышая значения коэффициентов Roll/Pitch P может помочь.
- Аппарат крутиться вправо с влево на 15 градусов при взлете - это связано с тем, что двигатели не одинаковые или регуляторы ESC не калиброваны.
- Аппарат стремиться улетать в одном направление даже в безветренную погоду - эту проблему решит триммирование , попробуйте SaveTrim или AutoTrim что бы выровнять его.
- Аппарат не выдерживает высоту или не может оставаться неподвижным в воздухе, как уже упоминалось выше - это ручной режим полета и он требует постоянного контроля стиками на аппаратуре для поддержания высоты и положения.
- Случайные подергивания по крену и тангажу обычно вызваны какими-то помехами в приемнике (например FPV оборудование расположено слишком близко к приемнику) или у регуляторов ESC есть проблема, которая может быть решена путем их калибровки.
- Если аппарат вдруг переворачивается во время полета - это почти всегда связано с механическим повреждением двигателей или регуляторов ESC
Режим удержания высоты / AltHold mode
В режиме удержания высоты аппарат удерживает постоянную высоту позволяя наклонятся и крутиться вокруг своей оси. Эта страница содержит информацию по настройке режима удержания высоты
Обзор
Если вы выбрали этот режим (AltHold) то система управление газом дроссельной заслонки автоматически поддерживает текущую высоту. Наклоны крена и тангажи , а так же кручения вокруг своей оси (рысканье) как и в режиме сабилизации и означает, что пилот сам управляет этим задавая углы и направление ореинтации.
Автоматическое удержание высоты является особенностью многих других режимов полёта (Loiter, Sport и других) так что эта информация относиться к этим режимам тоже.

Предупреждение: полетный контроллер использует барометр, который измеряет давление в воздухе в качестве основного средства определение высоты (атмосферное давление) и если давление воздуха меняется в вашем районе аппарат будет следить за этими изменениями , а не по фактической высоте ( если вы не в пределах 7 метров над землей и имеете ультразвуковой датчик SONAR который будет включен и следить за этим) . Если вы ниже 8 метров этот датчик (если включен) будет автоматически обеспечивать еще более точное удержание высоты.
Управление
Пилот может контролировать набор высоты или снижение с помощью ручки газа на аппаратуре.
- Если стик газа находиться в середине (40-60 процентов) то аппарат будет поддерживать текущую высоту.
- Если это значение вне этой зоны (меньше 40 или больше 60 процентов) аппарат будет подыматься или опускаться в зависимости от команды газа. Когда газ полностью убран - аппарат опускается на скорости 2.5м/сек и если стик газа максимальный - подыматься на 2.5м/сек. Эти скорости можно отрегулировать с помощью параметра PILOT_VELZ_MAX
Прошивка ArduCopter 3.1 и выше позволяет снимать с охраны (arming) в режиме удержания высоты. При постановки на охрану квадрокоптеру потребуется некоторое время, что бы отдохнуть в посадочном положении несколько секунд, что бы произвести внутреннюю калибровку, показывая ему, что вы приземлились, после этого вы сможете его поставить на охрану (disarm)
Настройка
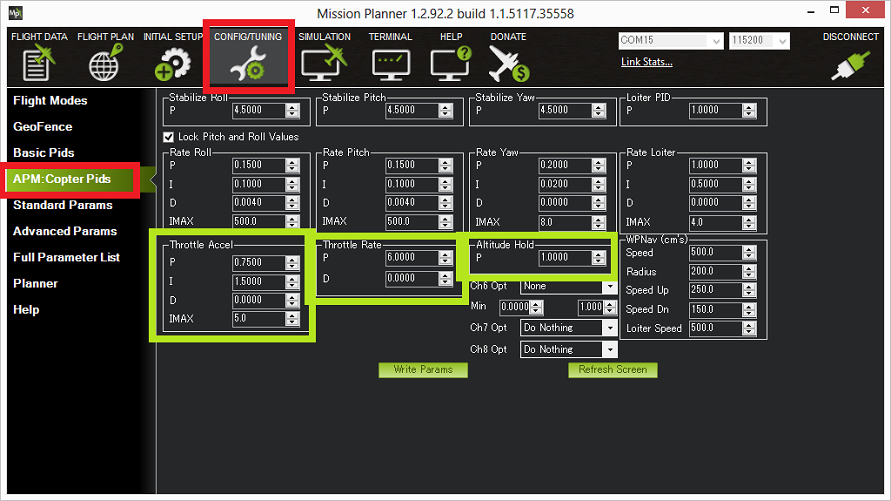
Параметр Altitude Hold P используется для корректировки ошибок показаний высоты (разница между заданой и фактической высотой) до желаемой или скорости снижения. Более высое значение делает его агрессивным пытающегося поддерживать эту высоту, что приводит к резким рывкам дроссельной заслонки.
Параметр Throttle Rate (обычно не требующий настройки) устанавливает коэффициент для набора или снижения на нужном ускорении вверх или вниз.
Параметры Throttle Accel PID корректируют ошибки ускорений (т.е. разницу между желаемыми и фактическими ускорениями) на выходе двигаеля. Отношение 1:2 Accel P к Accel I (тоесть P в два раза превышает значение I) сдедует соблюдать при стандартных парамерах настройки. Для очень мощных аппаратов можно получить лучшую отзывчивость за счет снижения этого соотношения на 50% (тоесть P до 0.5, I до 1.0)
Красивая схема логики работы полетного контроллера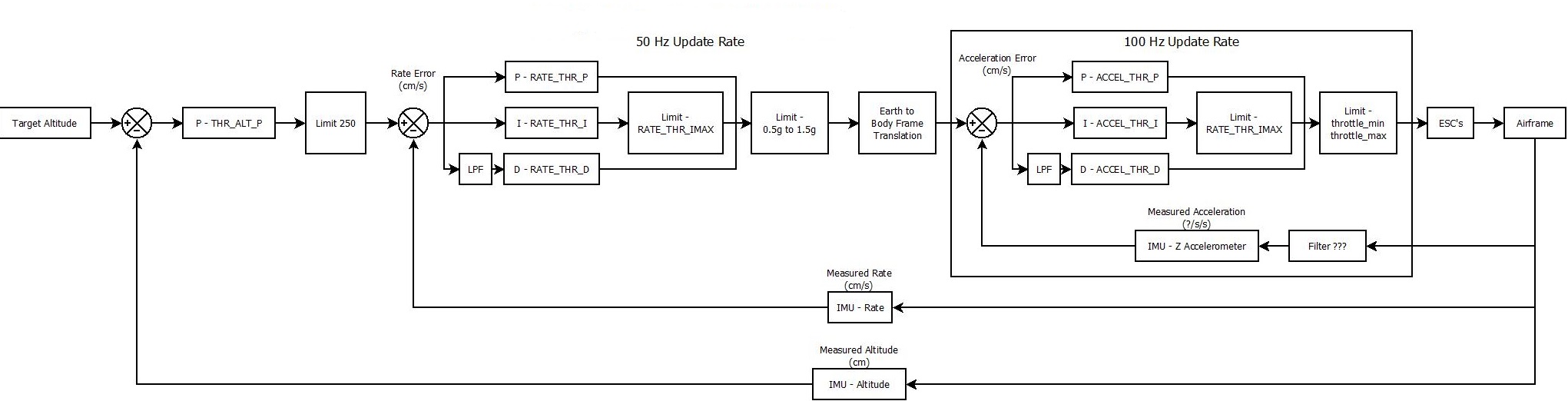{kind=link}
Проверка производительности удержания высоты с журнальной флеш памяти полетного контроллера
Просмотр производительности удержания высоты лучше всего сделать скачав журнал с флеш памяти полетного контроллера, затем открыть его в Mission Planner и отобразить график BarAlt (барометр высоты) СTUN сообщений и WPalt (целевая высота) и данные с GPS - RelAlt (инерционная военно-морская высота над уровнем моря, как ни странно включает данные GPS). Эти три параметра должны хорошо отслеживаться, как указано на картинке ниже.

Общие проблемы
Сильные вибрации могут привести к набору (подъему) высоты аппарата, как только будет включен этот режим. Изучите раздел по измерению и поглощению вибрации о том , как измерить и уменьшить вибрацию.
Квадрокоптер медленно спускается и взлетает , когда пилот в режиме стабилизации. Обычно это вызвано тем, что не установлен "средний газ" и происходит когда пилот переходит в режим AltHold от ручного режима полета (такого как Stabilize), который не держиться (не висит) на "среднем газе". Изучите раздел посвященный настройке "положение среднего газа дроссельной заслонки" на аппарате.
Двигатели на мгновение останавливаются, как только включается режим AltHold и аппарат набирает высоту - это обычно происходит когда пилот входит в этот режим в полете, нужная высота устанавливается в момент переключения на этот режим, аппарат начинает взлетать выше цели. Агрессивное установление высоты заставляет полетный контроллер на мгновение останавливает двигатели почти до минимума пока аппарат не начнет падать, что бы установить значение с высотомера. Избежать этого можно путем стабильного удержания высоты перед переключением в этот режим.
Изменения давления воздуха заставляют квадрокоптер дрейфовать вверх или вниз на пару метров в длительном периоде времени и для высоты параметр GCS точность составляет пару метров включая отрицательную высоту (имеется ввиду высота ниже домашней высоты)
Моментальная потеря высоты 1-2 метра после высокоскоростного горизонтального полета вызвана аэродинамическим эффектом, который приводит к моментальному низкому давлению на верхней части аппарата, когда полетный контроллер полагает, что он подымается. Нет никакого решения для этого поведения, хотя увеличение параметра INAV_TC_Z до 7 (по умолчанию 5) уменьшит эффект который указан в самом начале.
Удержание высоты становиться неустойчивым, когда аппарат находится близко к земле или в момент посадки - это может быть вызвано тем, что под влиянием завихрения воздушного потока пропеллерами при посадке барометр не правильно вычисляет высоту. Решением будет изоляция полетного контроллера в какой-нибудь проветриваемый корпус, который уменьшит влияние.
Внезапные изменения высоты вызваные попаданием света на барометр. После середины 2013 года оригинальные платы APM поставляются с черной лентой против этого эфекта.
Элементы питания
Очень важно что бы квадрокоптер имел достаточную мощность. режим AltHold требует больше энергии.
В идеале аппарат должен висеть с 50% дросселя газа и не больше. 70% - это опасно.
Внимание: Если вы используете экспоненты (кривые) на аппаратуре это может привести к нечуствительности газа при удержании высоты.
Режим Acro
Обзор
- Полетный режим Acro позволяет управлять углами наклона и поворотами вокруг своей оси непосредственно с аппаратуры, если стики отпустить то аппарат останется в текущем положении (и не будет стабилизироваться по горизонту)
- Дроссельный газ полностью ручной , управляется пилотом. Скорость двигателей без компенсации угла наклона - поэтому так же прийдется контролировать, что бы сохранить высоту. Если пилот уберет стик газа в минимальное положение то двигатели войдут в режим MOT_SPIN_ARMED и если аппарат в воздухе он потеряет управление начнет падать.
- Полеты в режиме Acro требуют постоянное управление стиками что бы подерживать и контролировать квадрокоптер так же , как и традиционный вертолет без вспомогательных систем. Этот режим позволяет делать маневры и сальто, которые не возможны в других режимах.
- Прошивка ArduCopter 3.1 и выше включает в себя функционал Acro Trainer , который может быть включен или выключен, что бы легче учиться летать в этом режиме.
Предупреждение: Режим Acro наиболее тяжелый для освоения. Вы можете несколько раз приложить аппарат к земле, прежде чем поймете как он работает. Поэтому потренируйтесь заранее на симуляторах вертолёта, что бы понять каково летать без какой-либо помощи контроллера.
Тюнинг параметров режима Acro
- Параметр ACRO_RP_P контролирует коэффициент скорости вращения для крена и тангажа оси (pitch and roll). По умолчанию значение 4.5 - оно будет давать возможность скорости вращения 200градусов в секунду. Более высокие значения приведет к повышению скорости вращения, низкие - к замедлению скорости вращения.
- Параметр ACRO_YAW_P контролирует коэффициент скорости вращения для оси рыскания. По умолчанию значениее 4.5, как и у крена и тангажа, будет давать возможность на 200 градусов в секунду вращения по часовой или против часовой стрелке.
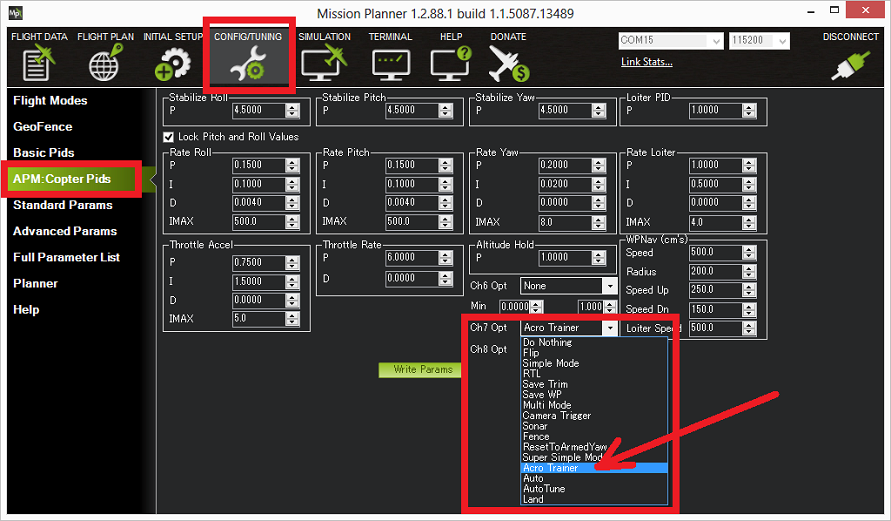
функция тренер Acro
Параметр ACRO_TRAINER может быть установлен на:- 0 = отключено
- 1 = автоматическое выравнивание. Квадрокоптер автоматически стабилизируется по горизонту, когда стики на аппаратуре будут отпущены. Агрессивность с которой он будет возвращается к уровню горизонта можно изменить меняя параметры ACRO_BAL_ROLL и ACRO_BAL_PITCH. По умолчанию значение 1,0 заставляет его вернуться к уровню со скоростью до 30 градусов в секунду. Большие значения сделают это быстрее.
- 2 = автоматическое выравнивание с ограничением угла наклона. Включает в себя автоматическое выравнивание как в предыдущем варианте, но квадрокоптер будет наклонятся не более 45 градусов (этот угол может быть сконфигурирован с параметром ANGLE_MAX).
Функцию тренера можно включать с помощью 7 и 8 канала. Используя трехпозиционный переключатель с положением выключения (т.е. PWM/ШИМ меньше 1200) будет отключать эту функцию тренера. Среднее положение переключателя позволит использовать "автоматическое выравнивание) и последнее положение (с PWM/ШИМ больше 1800) позволит включить функцию в режим "автоматическое выравнивание с ограничением". С этой позиции возможны переключения в позицию 0 и 2 (от автора: позиция 1 судя по оригинальной статье не возможна, только возращая на 0 а потом на 1).
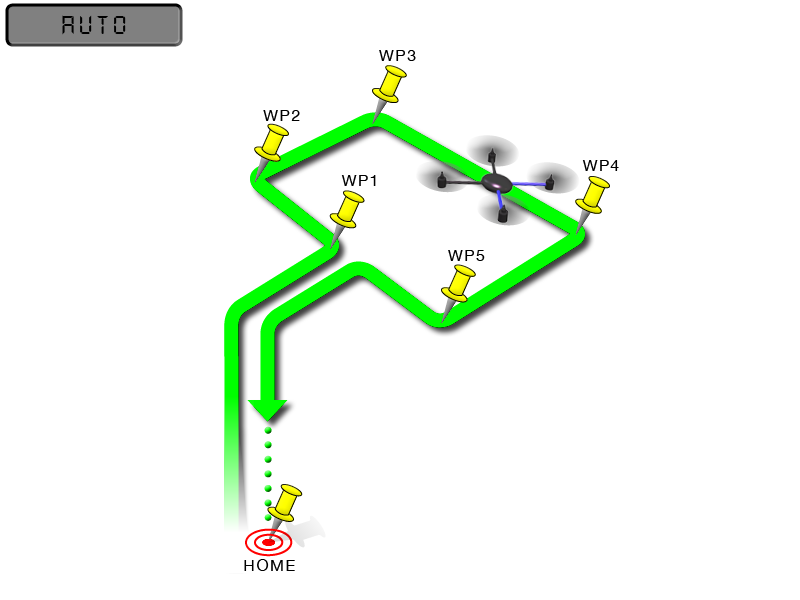
Режим Auto / полет по точкам
В автоматическом режиме квадрокоптер будет следовать по заранее запрограммированном сценарию, хранящемся в памяти автопилота, которая состоит из навигационных команд (то есть точек) и команды "сделать" (т.е. команды, которые не влияют на местоположение квадрокоптера, но вызывают затвор камеры ). Эта страница содержит обзор автоматического режима. Информация о создании сценария миссии можно найти на странице планирование миссии с путевыми точками и событиями.
Обзор
Режим AUTO включает в себя контроль высоты от режима AltHold и управления положением от режима Loiter. Не используйте этот режим если в AltHold и Loiter квадрокоптер не проверялся на полет. Все те же требования необходимы для обеспечении того, что бы полет был стабильным и прогнозируемым: минимальный уровень вибраций и помех компаса являются необходимымы. GPS должен функционировать хорошо в том числе параметр HDOP ниже 2.0.
Управление
АВТО должны быть настроен в качестве одного из режимов полета на переключателе режимов полета.
Если в начале выполнения миссии "полеам по точкам" квадрокоптер находиться на земле пилот должен обеспечить положение стика газа в минимальном положении, а затем перейдя в режим AUTO приподнять стик газа. В тот момент когда стик газа выше нуля - квадрокоптер начинает выполнять миссию полета по точкам.
Началом миссии считается переключение на Auto режим и если квадрокоптер уже взлетел допустим в режиме стабилизации и вы переведете его в режим Auto - команда взлёта уже будет считаться выполненой и он полетит к следующей точке указаной в маршруте.
В любое время пилот может вернуть контроль над автопилотом переключив полетный режим допустим на стабилизацию или Loiter. Если пилот снова включит режим AUTO миссия полетов по точком начнется заново!
В ходе автоматического режима стики газа, наклона игнорируются, кроме стика поворота вокруг оси. Это сделано для того, что бы пилоту можно было повенуть нос у аппарата (на котором, возможно, установленна камера). Автопилот будет пытаться вернуть котроль рысканья (поворота носа) когда пройдет к следующей путевой точке.
Завершение миссии
Миссии, как правило, имеют режим RTL (возращение на точку старта) как окончательную команду, чтобы обеспечить возврат аппарата после завершения миссии полетам по точкам. В качестве альтернативы последняя команда может быть посадкой на землю - режим "Land" в месте последней точки. Без последней команды режимов RTL или LAND аппарат просто остановиться на последней точке в воздухе и пилот должен будет вернуть контроль с аппаратуры.
Помните, что при использовании режима RTL, квадрокоптер вернется в точку "дом", которая устанавливается, когда он был снять с охраны (arming).
Как только квадрокоптер приземлился пилот должен убрать газ до нуля и в этот момент автопилот поставит двигатели на охрану (disarming) если он посчитал, что приземлился :)
Настройка автоматического режима полета по точкам
Режим AUTO включает контроль высоты от режима AltHold и управления положением от режима Loiter .
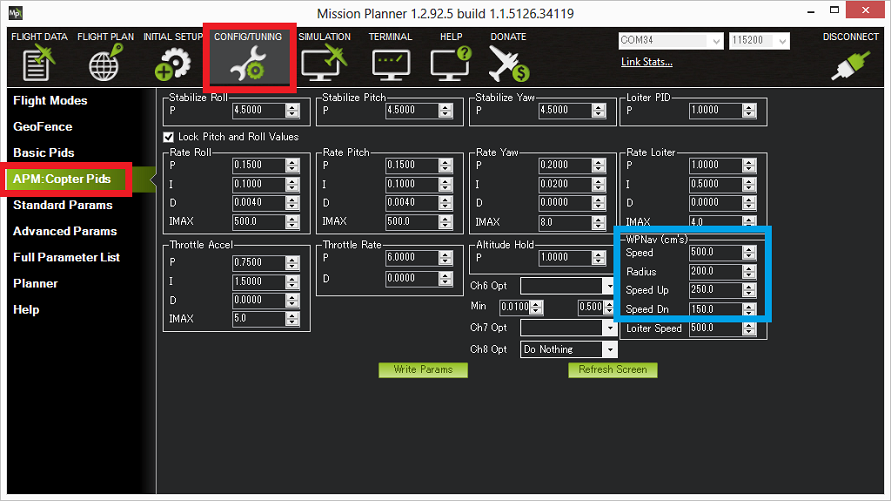
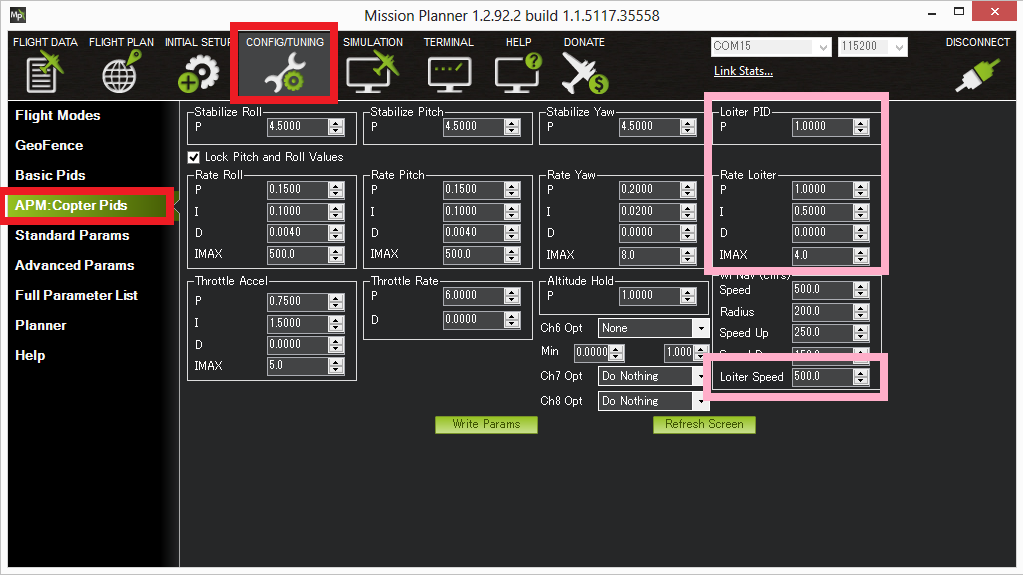
Максимальная горизонтальная скорость вертолета может быть скорректирована параметром (ака WPNAV_SPEED) в Mission Planner Config/Тюнинг >> АРМ: ArduCopter PIDS (см. синее выделение на картинке). По умолчанию используется значение 500 , которое означает скорость в 5 м/с. Типичный квадрокоптер может достигать максимальной скорости от 10 до 13 м/с (то есть 1000 ~ 1300), прежде чем она становится не в состоянии поддерживать высоту и горизонтальную скорость.
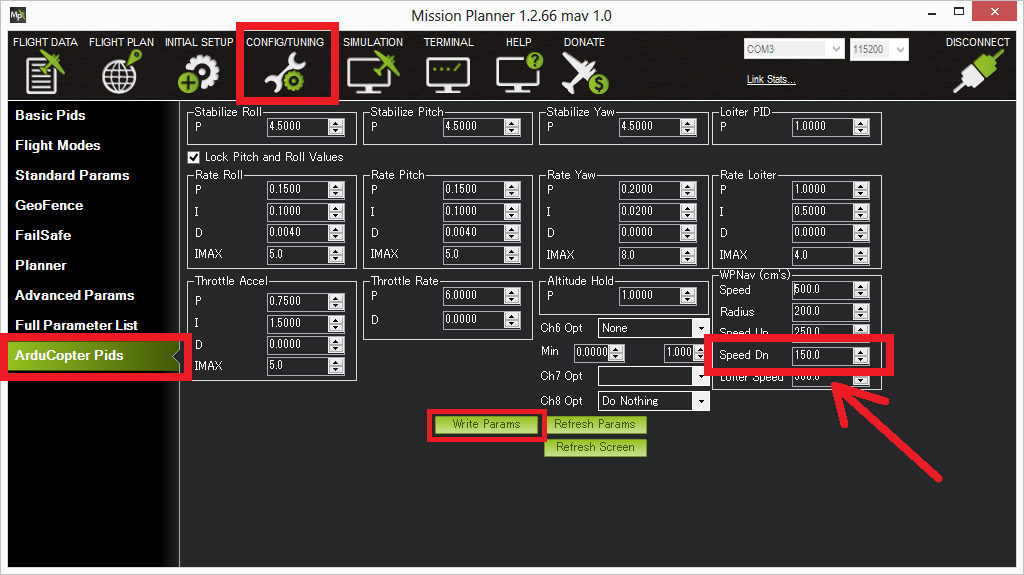
Вертикальные скорости вверх и вниз можно отрегулировать с помощью параметра Speed Up (WPNAV_SPEED_UP) и Speed Dn (WPNAV_SPEED_DN) .
Радиус позволяет контролировать, насколько близко аппарат должен прийти к точному положению точки маршрута, после чего маршрутная точка считается выполненой и квадрокоптер летит на следующую точку. Это относится только когда команда "путевая точка" включает в себя задержку в 1 секунду или более. Без промедления путевая точка считается "быстрой путевой точкой" и квадрокоптер начнет лететь к следующей точке.
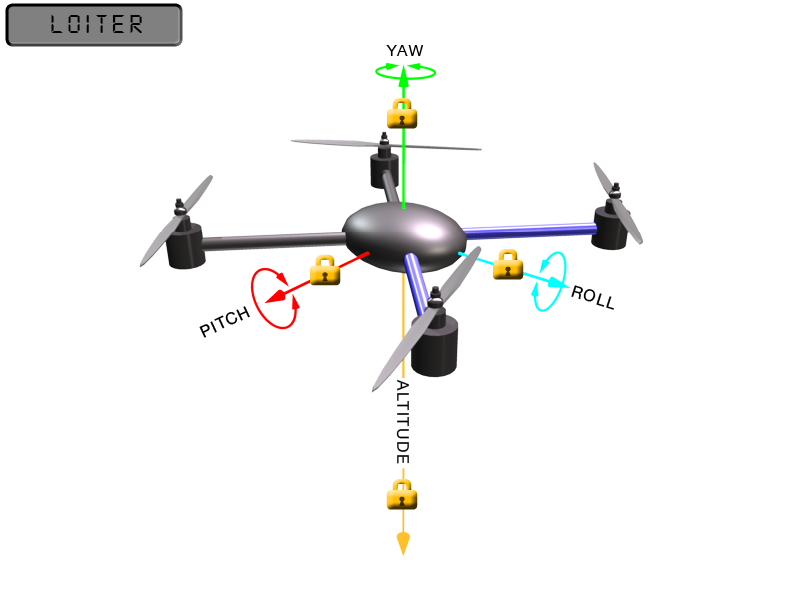
Режим Loiter
В этом режиме квадрокоптер сохраняет постоянное местоположение: курс и высоту. Эти страницы описывают этот режим и дает советы по настройке.
Обзор
При включении режима Loiter квадрокоптер автоматически пытается сохранить текущее местоположение: курс и высоту над уровнем моря. Хорошая позиция GPS, влияние магнитных помех на компас и низкая вибрация являются важными в достижении высоких результатов режима Loiter.
Управление
Пилот может контролировать местоположение квадрокоптера в горизонтальном и вертикальном положении через аппаратуру.
- Горизонтальное положение можно регулировать со стика наклона по крену и тангажу (Roll / Pitch) по умоглчанию максимальная горизонтальная скорость 5 метров в секунду. Для того, что бы изменить смотрите раздел Tuning указаный ниже. Когда пилот отпускает стик наклона аппарат останавливается до полной остановки.
- Высоту над уровнем моря можно регуляровать через стик газа дросселя, как и в режиме AltHold.
- Направление (курс) так же можно поменять через стик аппаратуры.
В прошивке ArduCopter 3.1 и выше вы можете снять с охраны (arming) в режиме Loiter, но только когда GPS обнаружил и зафиксировал спутники (3D Fix) и значение HDOP снизился до 2.0 и ниже.
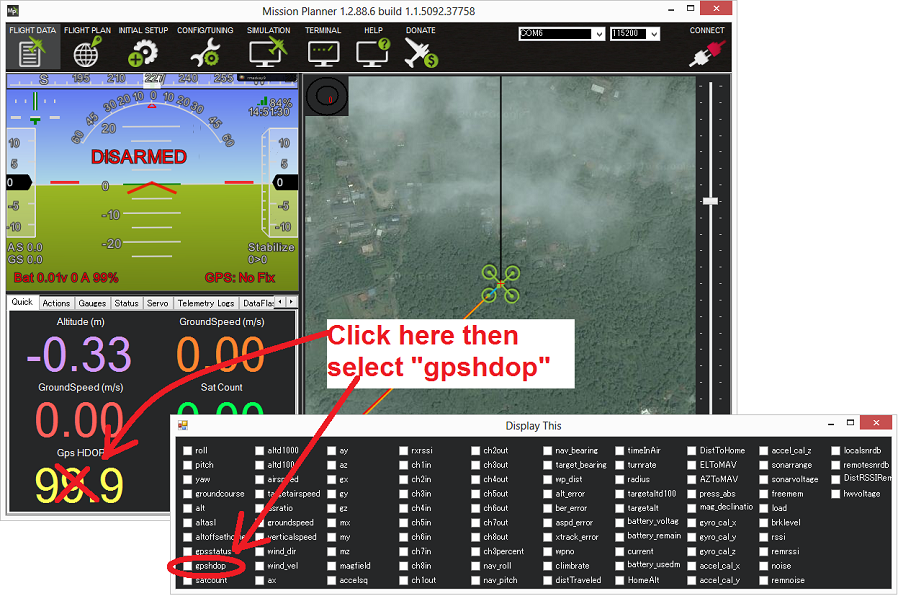
На полетном контроллере светодиод на плате должен гореть постоянно синим светом, когда спутники пойманы в режиме 3D fix.
Величина параметра HDOP хорошо видна через Mission Planer установленного на отображение, через заранее выбраный флажек "gpshdop".

Настройка
Режим Loiter включает в себя режим AltHold. Информация по настройке режима AltHold находятся на соответсвующей странице этого режима.
Максимальную горизонтальную скорость полета в режиме Loiter можно регулировать через параметр (WPNAV_LOIT_SPEED) Mission Planeer -> Tuning -> APM ArduCopter PIDS. Значения выражаются в сантиметрах в секунду. 500 единиц равны 5 метров в секунду. Максимальное ускорение в режиме Loiter всегда равно 1\2 от скорости режима Loiter.
Параметр Loiter PID P (в правом верхнем углу на картине выше) используется для конпенсации ошибок горизонтального положения (то есть разница между желаемой и фактической позицией) до желаемой скорости по направлению к целевой позиции. Как правило не требует регулировки. Но с версии 3.х рекомендуется установить в значение 0.2 иначе квадрокоптер будет бешено менять позицию.
Параметры Rate Loiter PID используются для преобразования желаемой скорости к цели до желаемого ускорения. Полученное желаемое ускорение становиться углом наклона, который затем передается в контроллер используя режим стабилизации. Как правило они не требуются в изменении.
Проверка производительности режима Loiter через память журнала полетного контроллера
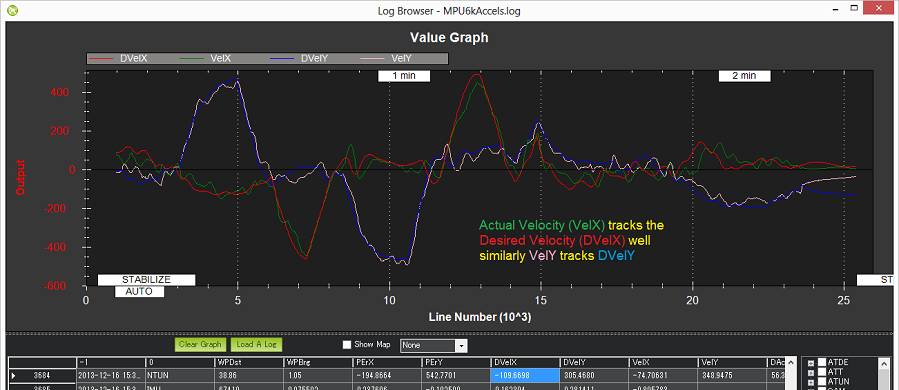
Просмотр производительности режима Loiter лучше всего сделать скачав данные журнала с вашего полетного контроллера. Затем откройте эти данные в Mission Planner и отобразите графики DesVelX в NTUN строке против VelX и DesVelY против Vely. В хорошем квадрокоптере скорости будут отслеживаться желаемые и действительные графики. Координата X - это широта (положительная - перемещение на север, отрицательная на Юг), Координата Y - это долгота (положительная - это восток, отрицательная - запад).
Проверка высоты производительности удержания такая же как и для режима AltHold.
Общие проблемы
Как упоминалось выше - режим Loiter включает в себя контроль по высоте от режима AltHold. Вопросы по режима AltHold рассмотрены на странице этого режима.
- Аппарат может делать круги (туалетит) как показано на видео ниже. Обычно это вызванно проблемой компаса как правло от магнитных помех силовых кабелей под полетным контроллером. Запуск процедуры compassmot или приобретение совмещенного модуля GPS+compass решает эту проблему (но лишний раз провести такую процедуру не помешает для практики и опыта). Другие проблемы могут проявиться из-за неправильной живой калибровке ориентации компаса.
- Аппарат взлетает и двигается в неправильном направлении (уносит) как только переходит в режим Loiter. Причиной может быть так же как и в пункте выше. еще может быть ошибка установки компаса, например больше 90 градусов. Попробуйте выполнить предложенные выше действия указанные выше.
- Квадрокоптер слоняеться как обычно, а потом вдруг взлетает в непрпавильном направлении. Как правило это вызванно ошибкой GPS. Нет 100% защиты от такого - это означает , что пилот всегда должен быть готов взять ручное управление. Обеспечьте хорошее показание HDOP до взлета, так может помочь уменьшение параметров GPSGLITCH_RADIUS и GPSGLITCH_ACCEL (смотрите вики страницу GPSGlitch).
Режим OF_LOITER
Это специальная версия режима LOITER которая будет использовать оптический датчик для поддержания позиции. Она еще не реализована, но работа продолжается. прежде чем выбрать этот режим убедитесь, что оптический датчик Optical Flow установлен и работает.
Режим посадки (Land)
Режим посадки (Land) пытается посадить аппарат прямо вниз и имеет следующие особенности:
Спускается до 10 метров (или пока датчик Sonar не почувствует землю) c помощью датчика контроля высоты со скоростью , которая указана в параметре WPNAV_SPEED_DN , который может быть изменён в Mission Planner Config/Tuning -> ArduCopter Pids.
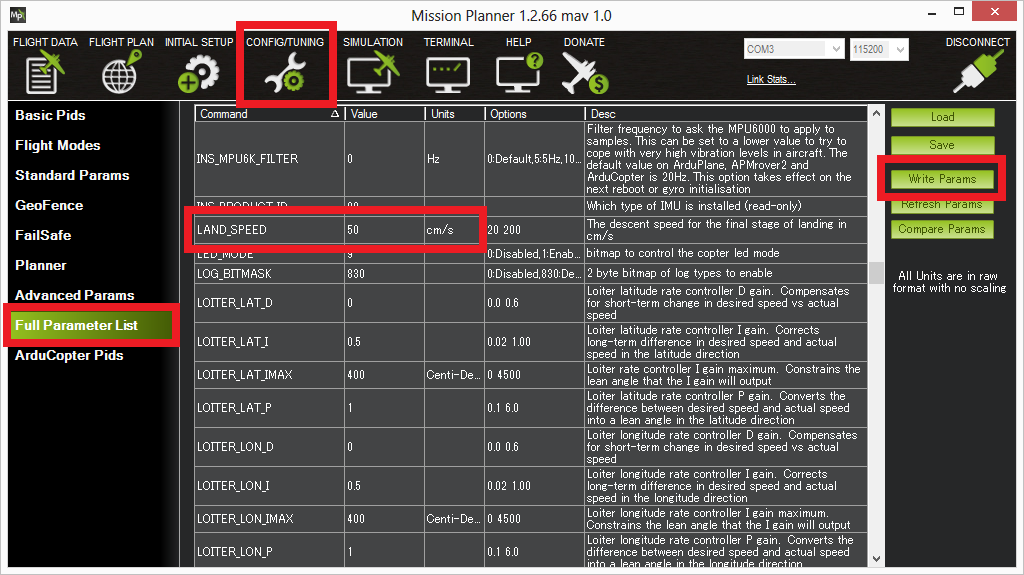
Последние 10 метров квадрокоптер должен спускаться со скоростью указаной в парамете LAND_SPEED который по умолчанию равен 50 сантиметрам в секунду
По достижении земли квадрокоптер автоматически выключит двигатели и поставиться на охрану (disarm) , если дроссель пилота находиться на минимуме.
Примечание: APM квадрокоптеру будет понятно, что он приземлился, если изменение положения остается между показаниями "от -20 до +20" сантиметров в секунду. Он не использует высотомер, что бы принять решение о выключении моторов, но аппарат так же должен быть ниже 10 метров над домашней высотой.
Примечание: APM: вертолет будет понятно, что он приземлился, если двигатели как минимум, но это подняться ставка остается между-20 см / с и 20 см / с в течение одной секунды. Он не использует высоту, чтобы решить, следует ли отключить двигатели исключением того, что вертолет также должна быть ниже 10 м над домашней высоте.- Если квадрокоптер подпрыгивает как воздушный шар на момент посадки на землю - попробуйте уменьшить параметр LAND_SPEED немного.
- Если у аппарата есть фиксация по спутникам GPS - он будет пытаться контролировать горизонтальное положение, но пилот сам может регулировать его как и в режиме Loiter.
- Если у аппарата нет GPS фиксации спутников для удержания горизонтали , то он будет находиться как в режиме стабилизации (Stabilize) и пилот может управлять углами наклона.
- Предупреждение! В любом AltHold режиме, которые основываются на AltHold, Loiter, Auto, AutoLand и RTL если выполнение посадки становиться не устойчивой , когда вы близко находитесь к земле (это видно в подпрыгиваниях или неспособность погасить двигатели должным образом после посадки) вы вероятно имеете проблему в контроллере , который неправильно считывает показания барометра (высотомера) зависящего от давления создаваемого на квадракоптере.
- В этом легко убедиться посмотрев журнал и видя как колеблятся показания высотомера , когда он у земли.
- Если это является проблеммой , то переместите полетный контроллер Ardupilot mega или оградите его соответствующим проветриваемом корпусе с дополнительной утановкой паралона на высотомере.
- Результат можно проверить путем летных испытаний и по результатам бортового журнала.
Режим RTL
При запуске режима Return to Launch квадрокоптер возращается и зависает над домашней позицией. Можно управлять поведением в режиме RTL. Эта страница описывает как использовать и настраивать режим RTL (возврат домой).
Обзор
При выборе режима RTL квадрокоптер вернётся в исходное домашнее положение. Сначало он поднимится на высоту указанную в параметре RTL_ALT прежде чем начнет движение в сторону дома (или будет поддерживать текущую высоту, если она превышает указаный параметр RTL_ALT). По умолчанию это значение 15 метров.
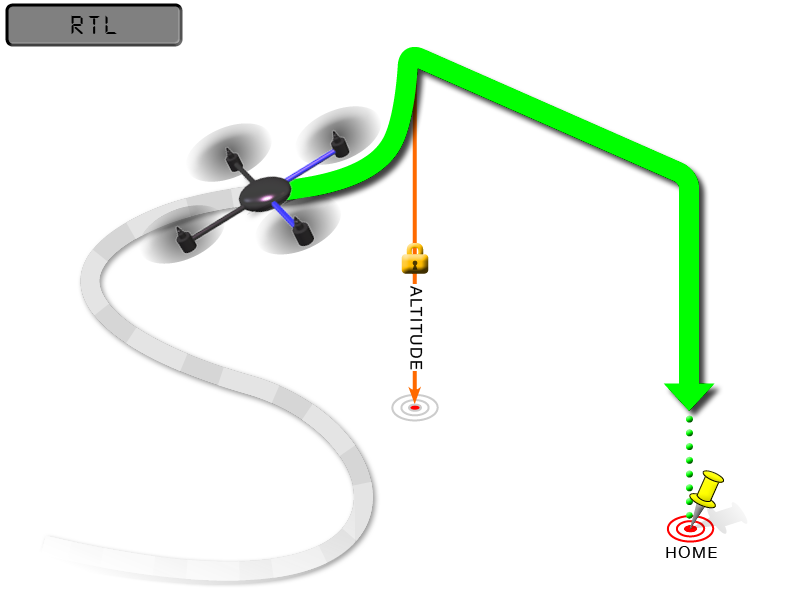
Режим RTL зависим от GPS , поэтому важно, что фиксация спутников установлена (3D Fix) прежде чем пытаться использовать этот режим. Перед снятием с охраны (arming) убедитесь, что синий светодиод полетного контроллера ardupilot mega apm вашего квадрокоптера горит постоянно синим и не мигает.
Режим RTL будет командовать квадрокоптеру вернуться в исходное положение и это означает , что он вернётся на место где был снят с охраны (arming). Таким образом исходное положение (home position) всегда должно быть фактическим положением GPS при взлете вашего аппарата. Для конфигурации контроллера ArduCopter если вы зафиксировали спутники GPS (3D Fix) а затем сняли с охраны свой квадрокоптер - исходное положение установиться там, где он был вооружен. Это означает, что если вы перейдете в режим RTL - квадрокоптер вернется на место, где был снят с охраны (arming)
Предупреждение: В режиме RTL полетный контроллер использует барометр, который измеряет давление воздуха в качестве основого средства для определения высоты и если давление воздуха в вашем районе полета меняется - аппарат будет следить за изменениями и не будет поддерживать высоту. Если у вас установлени датчик SONAR и вы не выше 15 метров - это может помочь.
Опции (Параметры, изменяемые пользователем)
RTL_ALT: минимальная высота квадрокоптера, который подымиться, перед возвращением домой.
- Задавая нолевое значение он будет возращаться на текущей высоте.
- Высоту можно установить в пределах от 1 до 8000 сантиметров.
- По умолчанию высота возращения составляет 15 метров (RTL_ALT = 1500)
RTL_ALT_FINAL: Высота квадрокоптера, который будет двигаться на заключительном этапе RTL или после завершения миссии полета по точкам.
- Установите в ноль, чтобы автоматически посадить квадрокоптер.
- Окончательная высота возращения домой может регулироваться от 0 до 1000 сантиметров.
RTL_LOIT_TIME: Время в миллисекундах режима Loiter над домашней позицией перед окончательным спуском на землю.
- Время для "замри и слоняйся" может быть в диапазоне от 0 до 60000 миллисекунд.
WP_YAW_BEHAVIOR: Устанавливает, как автопилот управляет (носом) "Yaw" во время миссий и режима RTL.
- 0 = Никогда не меняет направление носа (Yaw).
- 1 = Лицом к следующей точки или для режима RTL лицо в сторону домашней точки (Home).
- 2 = Лицом к следующей точки или для режима RTL лицом от домашней точки (Home).
LAND_SPEED: Скорость спуска для заключительного этапа посадки в сантиметрах в секунду.
- Посадочная скорость регулируется от 20 до 200 сантиметров в секунду.
Примечания
Другие настройки навигации также имеют влияние на режим RTL:
- WPNAV_ACCEL
- WPNAV_LOITER_SPEED
- WPNAV_SPEED_DN
- WPNAV_SPEED_UP
- Для использования RTL, блокировка GPS должно быть достигнуто (синий GPS светодиод и синий APM светодиод на твердой не мигает), прежде чем вооружать и взлет установить дома или запуска положение.
- Примечание на модуле UBLOX GPS светодиод не горит, пока acguiring спутники и на мигать, когда спутники были приобретены.
- Посадка и повторно вооружении вертолет сбросит дом, который это отличная возможность для полета на аэродромах.
- Если вы получаете заблокировать впервые во время полета, ваш дом будет установлен на месте замка.
- Если вы установите ALT_HOLD_RTL к ряду на отличное от 0 он будет идти и поддерживать эту высоту при возвращении.
- RTL использует waypoint_speed чтобы определить, как быстро он едет.
- После того, как вертолет прибыл на местоположение дома вертолет перейдет в режим слоняться, тайм-аут (AUTO_LAND), то земли.
- Для предотвращения автоматического посадку, просто изменить режимы с управляющего переключателя, чтобы очистить таймер посадки и возобновления нормального полета.
- Ручка газа контролирует высоту при возвращении или слонялся выше дома и не двигатели напрямую.
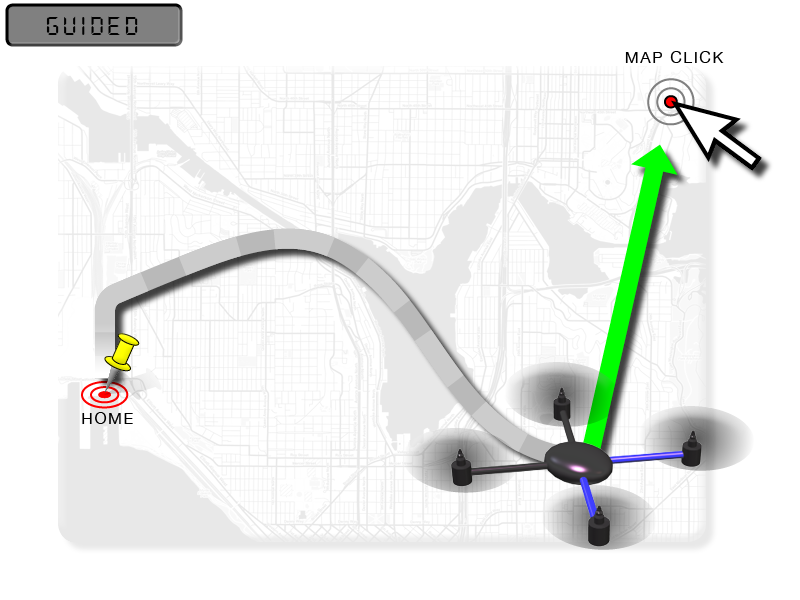
Режим полета на точку / Guided mode
Режим направления на точку дает возможность APM конфигурации ArduCopter динамически направлять квадрокоптер в указанную точку без проводов с помощью радиомодулей телеметрии с наземной станции (с ноутбука). Эта страница содержит инструкции по использования режима полета на указанную точку.
Обзор
Режим "полет на указанную точку" не является традиционным режимом полета, который назначается через аппаратуру, как в других режимах. Этот режим доступен в приложении наземной станции (например ПО Mission Planner) и телеметрии, позволяя в интерактивном режиме давать команды квадрокоптеру для полета на указанную точку, нажав на карте в Mission Planner. После того, как точка будет достигнута квадрокоптер зависнет в этом месте ожидая следующей цели. Режим Follow Me так же использует режим "полет на указанную точку" , что бы квадрокоптер следовал за пилотом.
Что вам потребуется
Для использования этого режима вам потребуется радиомодули телеметрии (обычно это 915 или 433мгц) которые позволят компьютеру общаться с автопилотом ArduPilot Mega APM во время полета. Это может быть ноутбук с ПО Mission Planner , планшет или телефон c DroidPlanner.
Инструкции
- Установите квадрокоптер на поле и установите соединение MAVLinr по беспроводной телеметрии между квадрокоптером и вашим ноутбуком.
- На ноутбуке используя ПО Mission Planner убедитесь, что пойманые спутники зафиксированы и установлен замок GPS 3DFix.
- Снимите с охраны (arming) и взлетите в режиме Stabilize, далее переключитесь в режим Loiter.
- На экране карты Mission Planner щелкните правой кнопкой мыши и в контекстром меню выберите "Fly to Here"
- Вам будет предложена высота полета в этом режиме, укажите её и нажмите OK
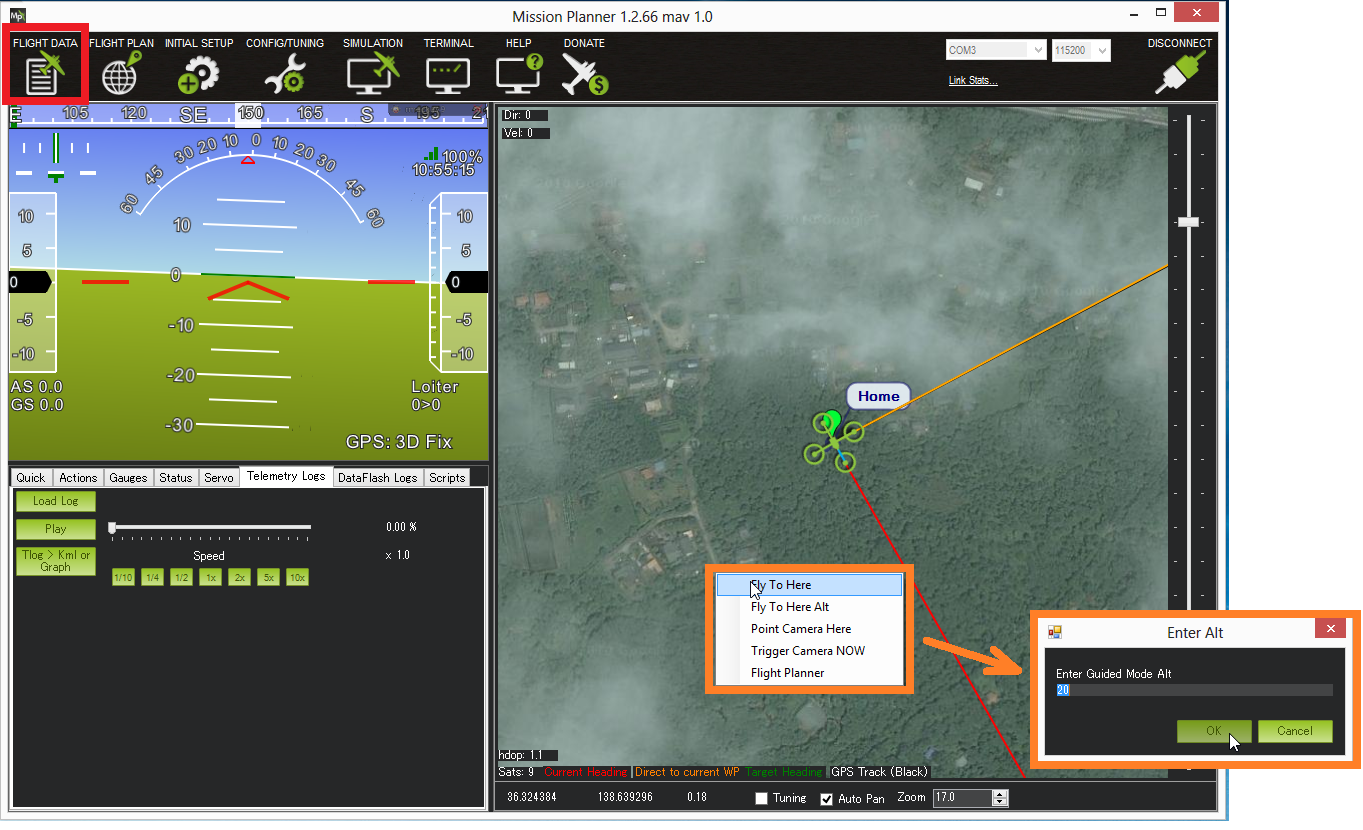
Установленная "точка" появиться на карте и оранжевая линия (которая указывает нос аппарата) должна указывать на эту цель.

Квадрокоптер должен лететь в указаную цель и ждать там, пока вы не укажете другую или не переключитесь в другой режим.
Примечание: Нет необходимости создавать один из ваших режимов полета, как "полет на указанную точку" (guided)
Simple и Super Simple режимы
- Простой (Simple) и Супер-простой (Super Simple) режимы используются в сочетании таких режимов, как Stabilize, Sport, Drift и Land.
- Они позволяют пилоту управлять движением квадрокоптера независимо от направления носа. Эти режимы полезны для новых пилотов, которые еще не освоили наклоны аппарата в воздухе в разных положения направления носа или квадрокоптер находиться слишком далеко, что бы понять его положение.
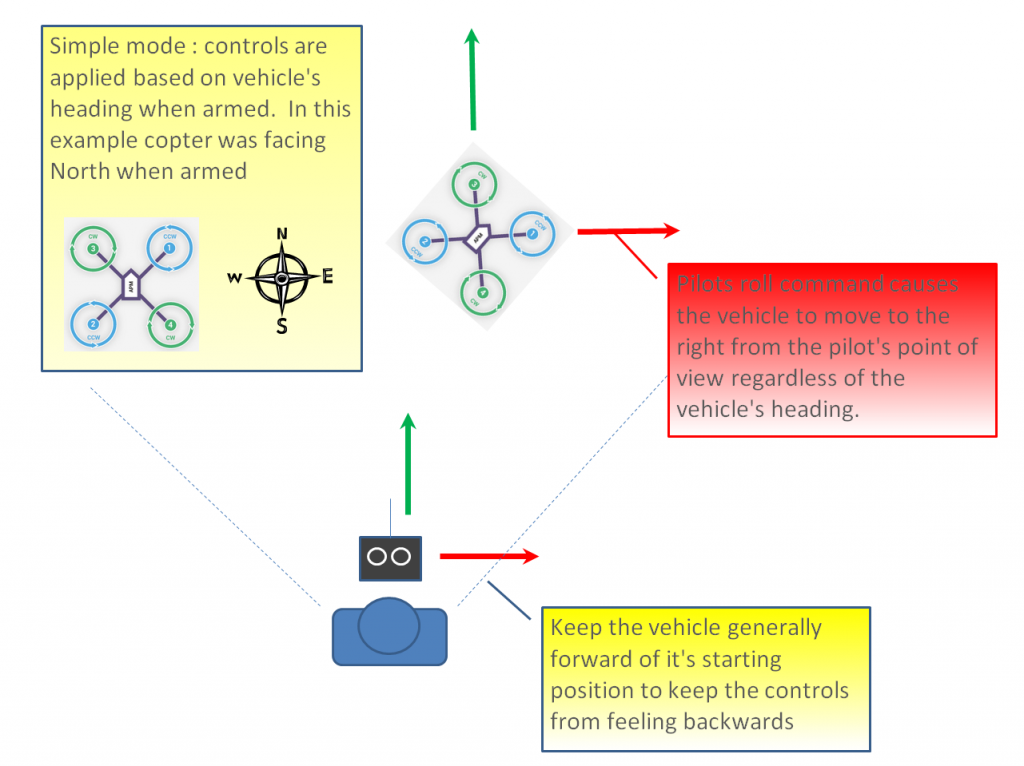
- Простой режим (Simple mode) позволяет управлять квадрокоптером , когда при взлете его направление носа всегда впереди по отношению к пилоту, которое пологается на направление по компасу.
- Супер простой режим (Super Simple mode) позволяет управлять квадрокоптером относительно его направления от дома (то есть, где он был снят с охраны - arming) и требует хорошие данные GPS.
- Эти режимы могут быть назначены на другие режимы путем использование переключателей на 7 и 8 канале ArdiPilot.
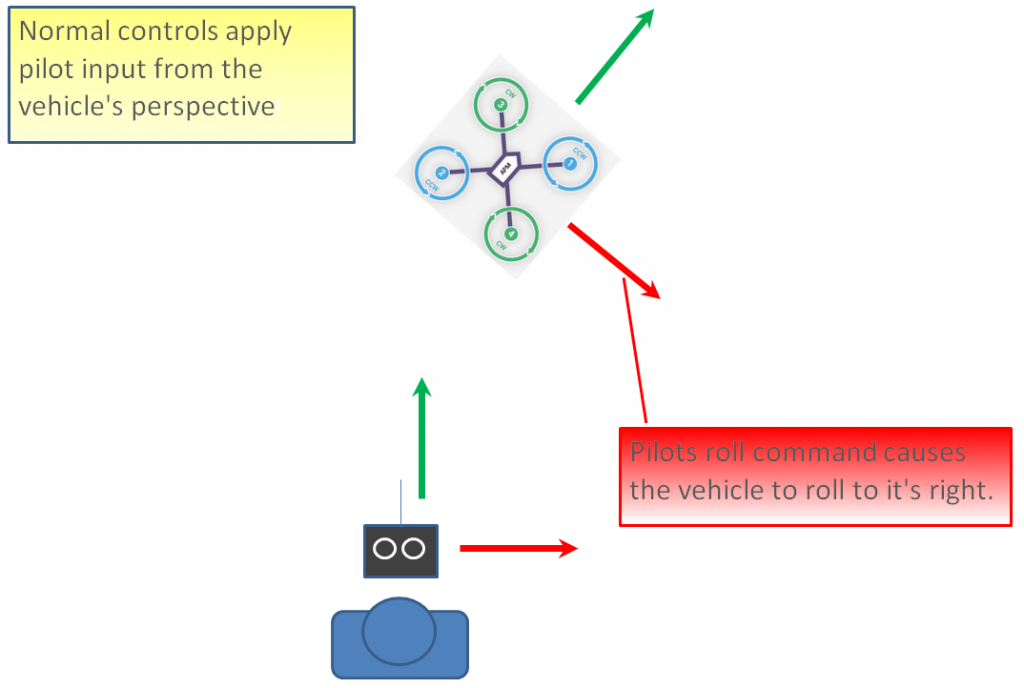
Без Simple и Super Simple режимов подаваемые стиками команды с аппаратуры применятся квадрокоптером. Например на картике указаной выше пилот делает крен вправо (красная линяя) и аппарат летит в сторону указанную красной линией по отношению к своему направлению носа.
Квадрокоптер будет летать в том же направление, что и подаваемые команды со стиков аппаратуры, когда направление носа смотрит от пилота, но когда аппарат повернут носом к пилоту и пилот неопытный - он может дизарентироваться и не понять, что управление становиться наоборот. Т.е. если квадрокоптер повернут носом к пилоту при крене влево аппарат будет лететь вправо.
Простой режим / Simple mode
Как и в режиме "Care free" на других системах , этот режим позволяет управляя стиками не задумываться об ориентации квадрокоптера в воздухе, как будто направления ориенации были записаны в его память при взлёте, когда он был снят с охраны (arming) и не зависимы от текущих курсов носа. Если вы даете команду лететь вперёд по горизонали - он улетит от вас даже если повернут носом к вам. Можно так же применить осевое врашение , что бы направить квадрокоптер в любом удобном направлении носа. Движения со стиков будут такими же как на момент взлёта.
Внимание! При снятии с охраны (arming) необходимо стоять позади квадрокоптера, что бы его нос указывал направление от вас. Во время полета вы должны пытаться сохранять свою позицию потому, что если он улетит за вас , а вы развернётесь - все управление станет зеркальным!
Как оговариволась выше - простой режим очень полезен в черезвычайных ситуациях, когда квадрокоптер находиться достаточно далеко и порой очень трудно определить его направление носа.
Супер простой режим / Super Simple mode
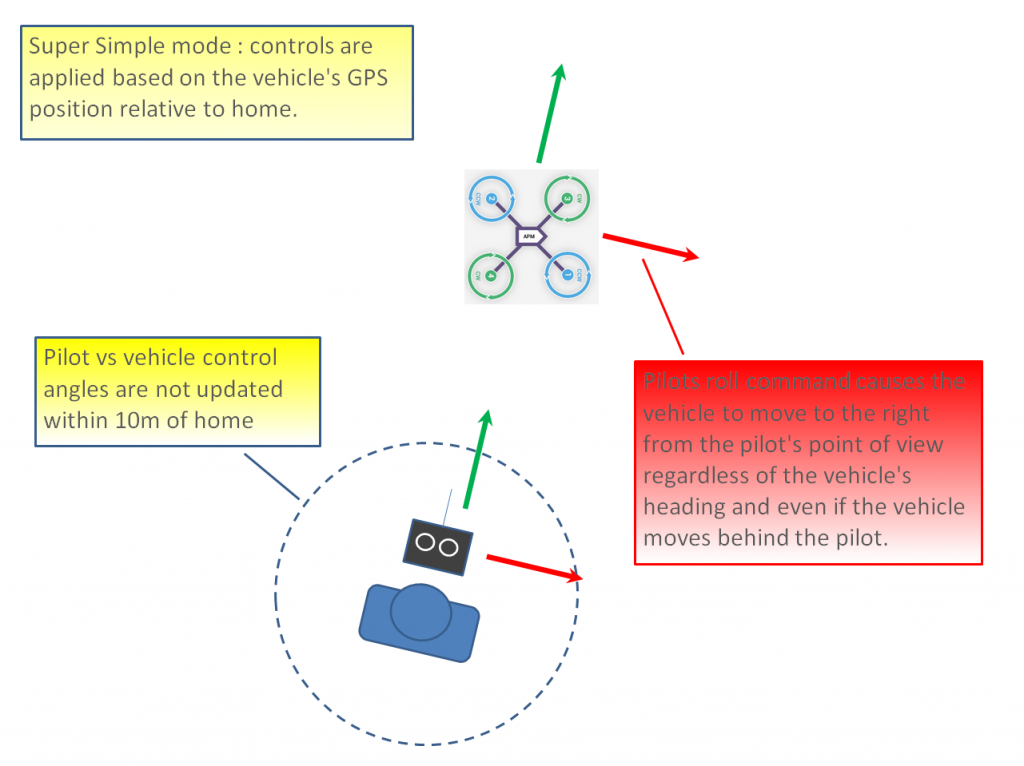
- Супер простой режим такой же как и простой режим за исключением того, что он использует положение квадрокоптера относительно дома вместо первоночального старта при снятии с охраны . Это означает, что независимо от того, где он находиться, потянув стик направления назад - вы заставите его вернуться в дому независимо от положения.
- Преимущество по сравнению с простым режимом является то, что элементы управления меняются с точки зрения пилота даже тогда, когда квадрокоптер улетает за пилота (за местоположение домашней точки).
- Если пилот держит наклон стика вправо - аппарат будет летать по кругу (по часовой стрелке) вокруг пилота (радиус круга может, как правило расти из-за "лага").
- Недостатком является то, что этот режим требует фиксации спутников по GPS (3D Fix) , поэтому вы должны убедиться, что у вас есть "замок" перед взлётом и синий светодиод на плате полтеного контроллера ardupilot mega горит постоянным синим светом.
- Ориентация не обновляется, когда квадрокоптер находиться в 10 метрах от дома, поэтому полеты с исходным местоположением следует избегать.
- Для обеспечения правильного управления при взлете , как и в просом режиме - вы должны снять с охраны (arming) стоя позади квадрокоптера, сморя носом с ним в одном направлении.
Использование 7 и 8 каналов
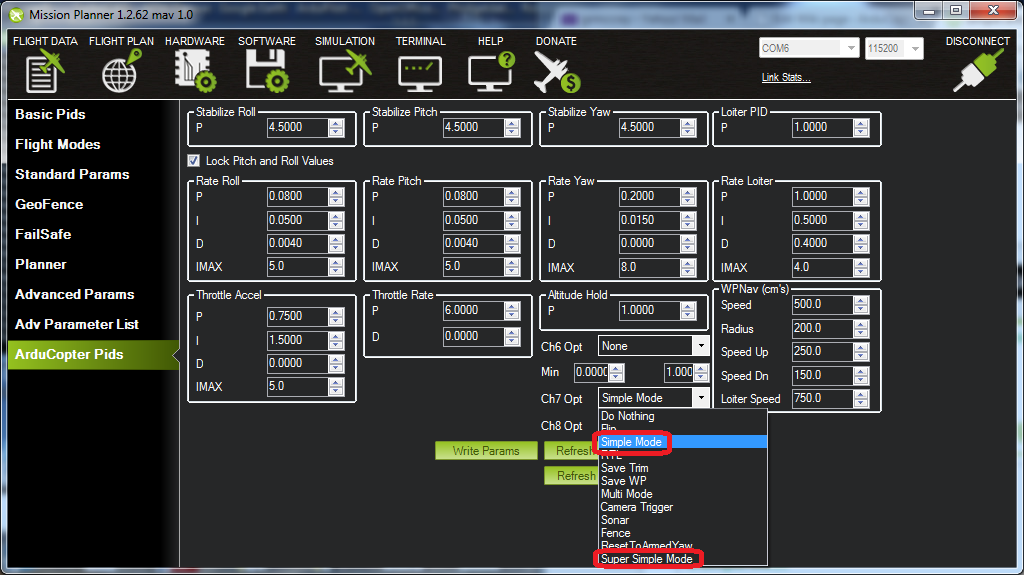
7 и 8 каналы Автопилота могут быть установлены на включение двух режимов : простого и суперпростого.
Если выбран простой режим - то тумблер на аппаратуре позволит включить его, так же как и супер простой режим.
Если вы используете трехпозиционный переключатель на аппаратуре и назначили на него супер простой режим, то среднее положение позволит включать простой режим, а высокое положение - суперпростой режим. Только Ch7 или Ch8 (а не оба) могут быть либо Simple или Super Simple mode.
Что бы убедиться в этом посмотрите на экран наземной станции , через телеметрию.
Режим полета "Круг"
Когда вы переходите в режим полета Circle аппапаи начинает летать в радиусе 10 метров с головным направлением носа указанному в центр круга.
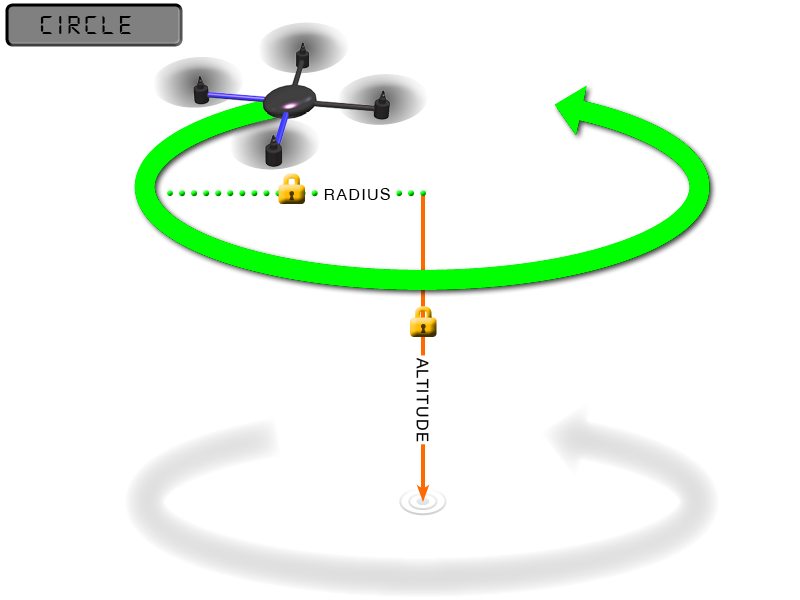
Радиус окружности можно установить через параметр CIRCLE_RADIUS. Единица устанавливается в метрах. Установка этого параметра в ноль позволит квадрокоптеру просто остаться на месте я медленно вращаться (полезно для панорамных снимков)
Скорость аппарата (градусы в секунду) можно установить с помощью параметра CIRCLE_RATE. Положительное значение заставит вращаться его по часовой стрелке, а отрицательное - против часовой стрелки. Параметр WPNAV_ACCEL позволяет задать горизонтальное ускорение, которое позволит достичь желаемого коэффициента ускорения по направлению к центру.
Пилот не имеет никакого контроля наклона по крену и тангажу, но можно изменить высоту ручкой газа, как в режиме AltHold и Loiter.
Пилот может управлять поворотами носа аппарата, но автопилот не будет возвращать контроль, пока режим не будет снова включен.
Комманда LOITER_TURNS в полетном режиме миссии "полета по точкам" (она же режим AUTO) вызывает режим Circle во время миссии.
Режим Drift
Эта страница дает советы и настройки для оптимального полета в режиме Drift.
Обзор
- Режим Drift позволяет использовать мультикоптер, как если бы это был самолет с автоматической системой скоординированных поворотов.
- Пилот имеет прямой контроль рысканья и тангажа , но наклоны крена контролируются автопилотом. Это позволяет интуитивно управлять аппаратом одним стиком при использовании аппаратуры режима Mode 2.
- Пилот имеет полностью ручное управление дроссельной заслонкой газа , как и в режиме стабилизации.
- Режим Drift доступен с версии APM 3.1: прошивка ArduCopter.
Как работает режим Drift
- Вы можете летать используя один правый стик аппаратуры mode2 управляя тангажем и рысканьем (pitch and yaw).
- Левый стик можно использовать в первую очередь для контроля высоты и не использовать для поворотов вокруг оси (рысканье, yaw).
- Когда вы уводите правый стик вперёд или назад квадрокоптер будет ускоряться в соответствующем направлении.
- Когда вы уводите правый стик влево или в право квадрокоптер будет поворачивать в указаном направлении.
- Аппарат так же повернется (рысканье) в указаном направлени куда и наклонится (крен) скоординируя поворот автопилотом.
- При использовании поворота рысканья автопилот применит команду наклона по крену.
- Это позволит поддерживать скоординированый поворот (без скольжения боком :) ).
- Отпуская стики на аппаратуре аппарат затормозит осью тангажа, что замедлит его движение и приведет к остановке.
- Квадрокоптер в режиме Drift со стиком газа по центру будет свободно держать горизонтальное положение (дрейфовать по ветру).
- Дроссельная заслонка газа управляется пилотом и означает , что пилоту требуется постоянная корректировка газом для поддержания высоты. Если пилот уберет стик газа полностью в ноль - двигатели перейдут в режим MOT_SPIN_ARMED и если аппарат был в воздухе - он потеряет орентацию и упадёт.
- Режим Drift зависим от вашего GPS для контроля.
- Если вы потеряете сигнал GPS в полете в режиме Drift аппарат перейдет в режим "посадки" (Land) или "удержания высоты" (AltHold) указаный в параметре failsafe_gps_enable.
- Вы так же должны быть готовы всегда вернуть его в режим стабилизации для ручного управления в случае необходимости.
Для кого полезен этот режим:
- FPV летуны, которые ищут динамики, летая как на самолете, а так же возможностью зависнуть и держать позицию.
- Новые люди, которые хотят попробовать более интуитивный и простой в освоении режим полета.
- Любой, кто хотел бы попробовать простой в управлении и простой в освоении очень веселый режим.
- Фотографы и видеооператоры, которые хотят более гладкого и скоординированного результата съемок.
Настройка Drift режим:
- В Mission Planner в разделе Configuration -> Fly Modes устанавливайте режим Drift.
- Более подробную информацию о настройке режима Drift ожидаются в ближайшее время, так как предстоят дополнительные усовершенствования.
Режим "следуй за мной"
Режим "следуй за мной" (Follow Me) делает возможность следовать аппарату за вами , когда вы гуляете - это ваш персональный дройд. (для тех кому нравиться можно назвать его летающими ножницами). Этот режим в конфигурации APM ArduCopter используется функция динамической путевой точки и командным телеметрическим протоколом MAVLink.
Что вам понадобится:
- Квадрокоптер с телеметрией
- Ноутбук (а лучше смартфон, например Android или планшет с OTG разъемом)
Инструкции по использованию
- Установите заранее один из полетных режимов на "Loiter"
- Настройте свой APMCopter на поле и установить соединение по беспроводной телеметрии MAVLink
- Убедитесь, что ваш USB GPS или устройство Bluetooth подключено к ноутбуку и появилось как последовательный порт. Используя программное обеспечение, поставляемое вместе с модулем, убедитесь, что он работает и что у вас есть замок GPS.
- Взлетите и переключитесь в режим Loiter. (Наберите достаточную высоту, что бы гарантировать что он не нападет на вас.).
- В ПО Mission Planner в разделе Flight Data щелкните правой кнопкой мыши на карте и выберите «Fly to Here". Если это работает, вы готовы попробовать режим "следуй за сной".
- В Mission Planner нажмите сочетание клавиш Control-F которая откроет окно и нажмите на кнопку "Follow Me"
После этого появится окно. Выберите последовательный порт, назначенный на свой GPS устройства и все, что скорость передачи данных он использует.
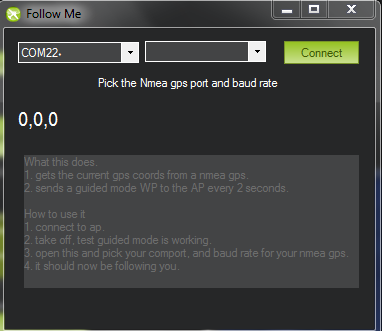
- Как только вы нажмете "Connect" Mission Planner будет читать данные GPS из устройства и отправить его на квадрокоптер как команду "лететь сюда" каждые две секунды.
- Теперь возьмите свой ноутбук и начните ходить.
- Квадрокоптер должен следовать за вами!
- Если вы установили высоту до 15 метров это будет хорошей идеей, чтобы увидеть как он летает за вами.
- Как упоминалось ранее, наберайте достаточную высоту, чтобы избежать травм.
- Серьезно это большая возможность, но безопасность очень важна при использовании режима "следуй за мной" особенно с открытым пропеллерами квадрокоптера.
- Внимание: Как и все другие режимы, в которых автопилот отвечает за удержание высоты (Loiter, AltHold) барометр используется в расчете высоты и аппарат может дрейфовать в течение долгого времени следя за изменением давления воздуха.
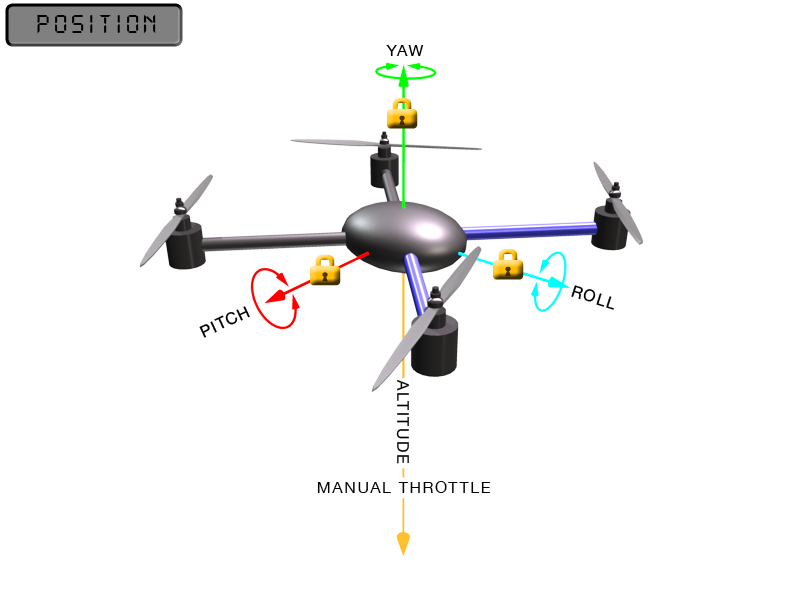
Режим "позиция" / Position mode
Этот режим закой же как режим Loiter , но с ручным управлением дросселя газа. Это означает , что в резиме "позиция" квадрокоптер сохраняет постоянное местоположение и направление позволяя пилоту конролироваться дроссель газа вручную.
Режим "позиция" зависит от GPS , поэтому важно убедиться, что GPS зафиксировал спутники до снятия с охраны (arming) при использовании этого режима. Фиксация спутников обозначается следующими значениями светодиодов:
В оригинальной 3DRobotics и части клонов это:
- Синий светодиод на АРМ - горит постоянно.
- Синий светодиод на модуле GPS - горит постоянно.
- Синий светодиод на GPS + Компас - мигает.
Так же можно убедиться в фиксации спутников через телеметрию и наземную станцию.
Режим "спорт"
Эта страница описывает режим Sport который доступен в версии ArduCopter 3.1 и выше.
Обзор
- Режим "спорт" так же известен , как "контролируемая стабилизация" совмесно с удержанием высоты.
- Он был разработан, что бы быть полезным для FPV полетов и съемок или полетах на площадках, потому что вы можете установить аппарат под определенным углом наклона и он будет удерживать этот угол.
- Пилот может использовать стики для наклонов и кручение по оси контролируя скорость и вращения. Когда стики отпущены - квадрокоптер остается в установленном положении.
- Квадрокоптер не будет наклоняться больше 45 градусов (этот угол можно регулировать с помощью параметра ANGLE_MAX).
- Высота поддерживается полетным контроллером ardupilot mega и поэтому квадрокоптер будет пытаться удерживать текущую высоту, когда стик дросселя газа будет не ниже/больше 10% "середины газа дросселя" (см. установка середины газа дросселя) иначе - это будет набор высоты или снижение со скоростью до 2.5 метров в секунду (эта скорость регулируется с помощью параметра PILOT_VELZ_MAX).
Светодиоды и сигналы
Плата APM 2.5
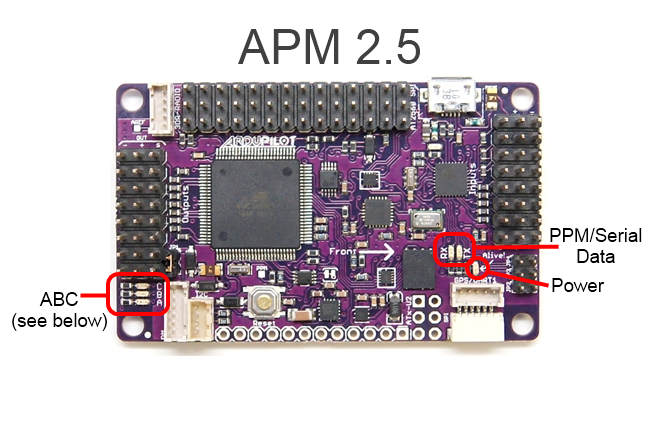
| Светодиод | Поведение: |
| Светодиод питания | Идет питание |
| A (Красный) | Горит : снят с охраны (Arm), вооружен. двигатели будут вращаться при газе. Одиночное мигание = поставлен на охрану (Disarm), двигатели не вращаются. Двойное мигание = поставлен на охрану (Disarm) двигатели не вращаются, не может быть снят с охраны из-за ошибки в предварительной проверке при снятии с охраны (Pre-arm Check Fail) |
| В (желтый) | Мигает только вместе со светодиодами A и С при калибровке регуляторов ESC или при выполнении автоматического трима в полете |
| С (синий) |
Горит постоянно = GPS рабочий, 3D фиксация спутников. Мигает = GPS работает, спутники не зафиксированны или не работает |
| PPM / Серийный порт | Мигает, когда идет обмен данными |
Плата APM 2.0
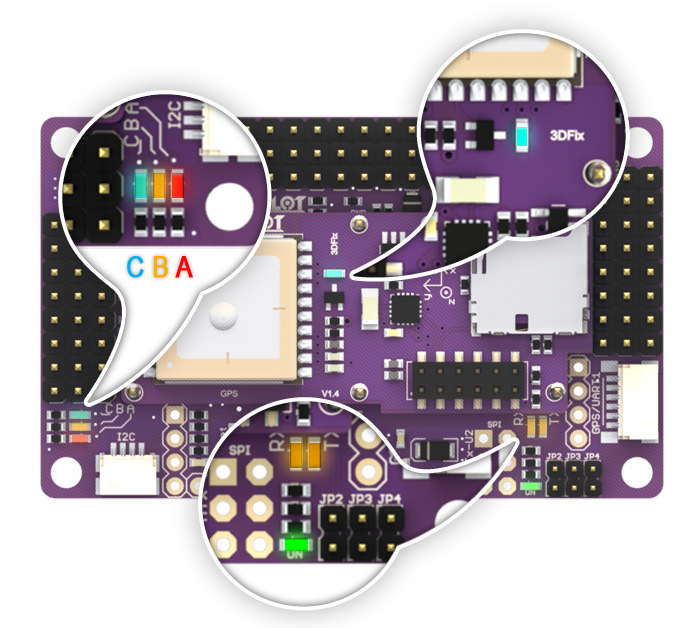
| Светодиоды: | Поведение: |
| Светодиод питания | Есть питание |
| 3D Fix | Мигает во время GPS ждет фиксации спутников; горит постояно тогда когда спутники зафиксированны |
| Азбука | См. ниже |
GPS + компас
Модуль 3DR GPS + компас имеет два светодиодных индикатора: один для отображения питания (красный или зеленый) и один для фиксации спутников GPS (мигающий синий).| Светодиоды: | Поведение: |
| Питание | Постояннокрасныйкогда питание |
| Фиксация спутников GPS | Мигающий синий , когда 3D фиксация GPS спутников установлена |
Предварительная проверка безопасности при снятии с охраны (Pre-arm Check)
APM с прошивкой 3.0.1 (и выше) включает в себя предварительную проверку безопасности при снятии с охраны, которая приводит к тому, что одна из проблем была выявленна:
- Проверяет, что была выполнена калибровка Радио.
- Проверяет, что была выполнена калибровка акселерометра.
- Проверяет, что компас здоровый и правильно передает данные.
- Проверяет, что смещение компасе не слишком большое (т.е. корень SQRT (х ^ 2 + у ^ 2 + Z ^ 2) <500).
- Проверяет, что калибровка на живую компаса или на базе журналирования была выполнена или что "COMPASS_LEARN" включен.
- Проверяет адекватное напряжение магнитного поля: (APM1/APM2 около 330, PX4/Pixhawk около 530)
- Проверяет, что барометр здоровый и правильно обменивается данными.
- Если круговая ограда (Fence) включена или снимаете с охраны в режиме Loiter проверка безопасности проверяет, что:
- у вас есть фиксация спутников по GPS
- параметр GPS HDOP < 2.0 (настраивается параметр GPS_HDOP_GOOD)
- Путевая скорость меньше 50 см / сек
- Проверяет, что полетный контроллер питается между 4,5 и 5,5 вольт для АРМ 1 или АРМ 2
- Проверяет, что 7 и 8 канал не настроен на управление на одну и ту же функцию.
- Если включен Radio FailSafe проверяет минимальное значение стика газа канала не ниже FS_THR_VALUE
- Проверяет параметр ANGLE_MAX (т.е. максимальный угол наклонав большинстве режимов) является больше 10 и меньше 80 градусов
- Проверяет уровень PWM по четырем первым каналам , если они меньше 1300 и не больше 1700
Если все остальное нормально, за исключением того, когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре), он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно, не прошел проверку Pre-Arm безопасности. Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу.
Видео с подробным описанием Pre-Arm safety check
Отключение Pre-Arm Safety Check
Если вы уверены, что проверка на сбок не настоящая проблема вы можете отключить её:
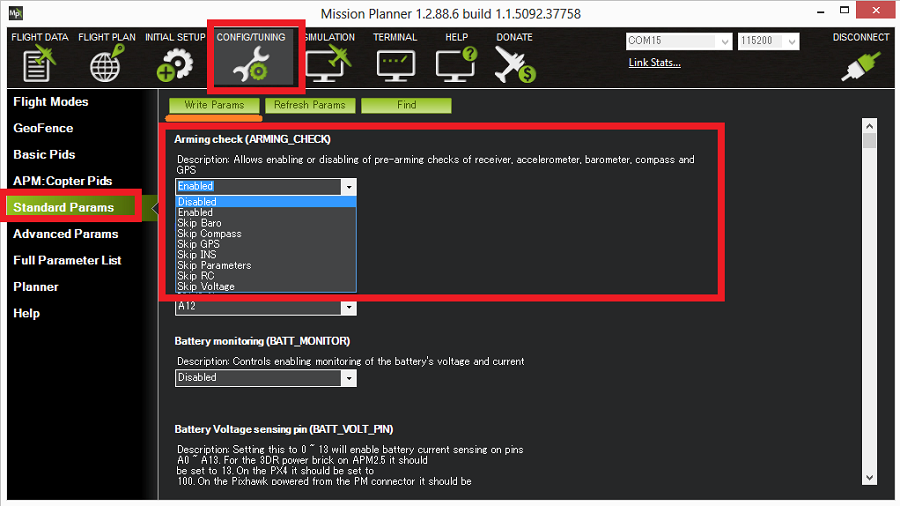
- Подключение APM к Mission Planer
- Зайдите в раздел Config/Tuning -> Standart Params
- установитe Pre-Arm Check на значение "Disabled" или, если вы используете AC3.1 (или выше), вы можете пропустить этот пункт, который вызывает сбой.
- Нажмите кнопку "Write Params"
В идеале вы должны определить причину сбоя Pre-Arm, и если она может быть решена, верните этот параметр к исходному положению - "Enabled"
Чтобы понять, что вызвало сбой Pre-Arm Check:
- Подключите свой полетный контроллер к компьютеру через порт USB.
- Запустите Mission Planner и соединитесь с ArduPilot нажав кнопку "Connect" в правом верхнем углу.
- Включите аппаратуру радиопередатчика и удерживайте стик газа вниз и вправо (процедура постановки на охрану - Disarm).
- Первый причиной проверки отказа Pre-Arm безопасности будет отображаться красным цветом в окне HUD Mission Planner.
- Каждая проблема и адрес будет сообщаться при попытке снять с охраны, как указано выше.
- Когда все проблемы были исправлены, вы увидите проверку "снятия с охраны" (Pre-Arm Check) в окне HUD.
- После этого можно отключить от компьютера и имеють хорошую гарантию того, что снятие с охраны (arming) будет происходить в обычном режиме.
Устранение проблем предварительной проверки снятия с охраны (Pre-arm fix):
- Если не прошла проверка Радио rалибровки - сделайте повторно калибровку радио .
- Если не прошла проверка калибровки акселерометра - сделайте повторно калибровку акселерометра .
- Если происходит сбой компаса - сделайте заново живую калибровку компаса .
- Если проверка барометра (высотомера) не работает, то ваш контроллер скорее всего имеет аппаратную проблему с барометром.
- Если проверка позиция GPS не удалась
- ждать HDOP вашего GPS, чтобы он опустился ниже 2.0, прежде чем пытаться снимать с охраны. Вы можете сделать это более легко - наблюдая в области быстрого экрана Mission Planner.
- Отключите Geofence в Config/Тюнинг -> Geofence
- Снимите с охраны (arming) в полетный режим Стабилизации (Stabilize mode) и позже перейдите в режим Loiter (этот режим (loiter) не рекомендуется на момент старта, потому что хорошая фиксация по спутникам GPS требуется для Loiter и HDOP является хорошим показателем того, что GPS позиция хороша)
- увеличить параметр GPS_HDOP_GOOD от 200 до 250 (это также не рекомендуется по тем же причинам, что и выше)
- Если проверка напряжения питания полетного контроллера не успешная:
- проверить UBEC , который используется для подачи напряжения на АРМ напряжение должно быть между 4,5 и 5,5 вольт (чем ближе к 5V, тем лучше)
- проверить, если какие-либо периферийные устройства, которые питаются от АРМ и имеют слишком высокий потребляемый ток.
- Если на канал 7 и 8 было установлено тоже самое (одинаковая функция) измените один из них с помощью Mission Planner Config/Тюнинг -> PIDS
Снятие с охраны моторов
Перед снятием с охраны двигателей (arming of motor), убедитесь, что все люди и предметы вдали от пропеллеров. Тогда сделайте следующее:
- Включите аппаратуру
- Подключите вашу LiPo батарею. Красные и синие светодиоды должны мигать в течение нескольких секунд, как гироскопы откалибрируются (не двигайте квадрокоптер)
- Pre-Arm check проверка будет запущена автоматически и если обнаружены какие-либо проблемы у APM 2.x то будет дважды мигать в цикле красный светодиод. Пожалуйста, обратитесь к этой странице.
- Убедитесь, что ваш полетный режим установлен на стабилизацию, ACRO, AltHold или Loiter.
- Если вы планируете использовать автопилот (т.е. Loiter, RTL, Drift, Auto или Guided mode), вы должны подождать 30 секунд после того, как GPS получит 3d фиксацию спутников. Это даст время позиции GPS, чтобы обосноваться. На APM2 замок GPS обозначается синим светодиодом который будет постоянно гореть.
- Снимите с охраны моторы (arming) удерживая стик газа вниз и вправо в течение 5 секунд. Снятие с охраны занимает около 5 секунд это вновь инициализирует гироскопы и барометр. Не держите стик газа вправо слишком долго (> 15 секунд) иначе вы запустите AutoTrim функцию.
- После того, как произошло снятие с охраны красный светодиод будет постоянно гореть и пропеллеры медленно закрутятся. Скорость кручения можно отрегулировать с помощью параметра MOT_SPIN_ARMED.
- Поднимите ручку газа в взлета.
Примечание: вы можете только снимать или ставить на охрану в режимах Stabilize, ACRO, AltHold и Loiter
Примечание: если вы оставите стик газа на минимуме в течение 15 секунд в любой из вышеперечисленных режимов двигатели автоматически поставятся на охрану (disarm).
Снятие двигателей
Для снятия двигателей выполните следующие действия:
- Убедитесь, что ваш полетный режим установлен на один из режимов: Stabilize, ACRO, AltHold или Loiter
- Держите стик газа при минимальном значении внихзу и влево в течение 2 секунд
- Красный светодиод постановки на охрану начнет мигать на APM2.
- Отключите батарею Lipo
- Выключите аппаратуру
Отрыв от земли - советы для новичков
Эта страница дает несколько советов о начальных действиях полета для людей которые не имеют опыта управления самолетов или квадрокоптеров.
Первый полет
Убедитесь, что ваш тумблер на аппаратуре установлен в режим стабилизации. Медленно поднимите стик газа, пока квадрокоптер просто не поднимется с земли.
Если вам кажется, что он наклоняется или не подымается прямо - уберите газ и приземлите его. Держите аппарат твердо в воздухе с четкой ореинтацией к вашему телу, подвигайте стик газа немного, что бы получить представление о том, что происходит. Перемещайте стик наклона вперед, назад, влево и в право, квадрокоптер должен делать такие же движения оставаясь по орентацией лицом от вас. Если это не так - скорее всего вы установили не правильно:
- не правильный тип рамы, например перепутан тип X с Plus
- подключены двигатели в неправильном порядке
- не правильные пропеллеры - отличаются друг от друга
Если какой-нибудь из стиков управления находиться в реверсии (например при команде вперед аппарат летит назад) то вам необходимо изменить в настройках аппаратуре реверсию по этому каналу. т.е. если она была - убрать её и наоборот. Обратитесь к инструкции вашей аппаратуры, что бы понять как это сделать. Или поищите в интернете подобные случаи. Хорошим тоном является повторная калибровка радио после того, как вы инверсировали канал управления.
Если он поднимает гладко, вы можете увидеть как он крутиться вокруг своей оси (рысканье). Это не должно быть более 30 градусов и будет исравлено в дальнейшем после отрыва от земли. Так же не должно быть выраженных колебаний (если это есть, то скорее всего у вас несбалансированный пропеллер или неправильный мотор).
Квадрокоптер, должен оставаться на месте и вы не должны боротся с ним корректируя его то влево, то враво, то назад или вперед. Если вы видите такое поведение - не пытайтесь исправить через трим на пульте (это сбивает калибровку). Скорее всего это означает, что кварокоптер калибрировался не на плоской поверхности или рама не правильная (или двигатель не коректно установлен). Приземлите и исправте это - сделайте калибровку по горизонту (Pre-Flight Calibrate в Mission Planner)
Если у вас возникли проблемы и квадрокоптер не парит гладко в воздухе, обратитесь к руководству по устранению неполадок
Если в режиме стабилизации все в порядке, вы будете готовы к более продвинутым режимам, таких как AltHold и Loter.
Советы первых полетов
- Убедитесь, что вы в хорошей аэродинамической среде, без ветра. (Ветер будет играть против вас в режиме AutoTrim.)
- Убедитесь, что у вас не установлены тримирование на аппаратуре. (APM должен сам быть оттримирован,а аппаратура - нет.)
- Взлетайте на высоту около 3-5 метров - это достаточно для большинства моделей.
- Убедитесь на практите , перед использованием AutoTrim, что правый стик наклонов держит квадрокоптер в воздухе супер стабильно без движений. (даже там, где ветер)
- Мы рекомендуем не начинать в простом режиме (Simple). Начните свой полет в режиме базовой стабилизации (Stabilize).
- APM устанавливает домашнюю точку в момент снятия с охраны (arming), поэтому снимайте с охраны ваш квадрокоптер в месте, где вы хотите назначить его в качестве исходного положения.
Предупреждения о разряде батареи
При полетах на конфигурации ArduCopter вы должны иметь ввиду, что он летает по-другому, чем самолет. У самолета есть пропеллер который толкает поток воздуха , даже если двигатель остановится его можно посадить удачно. В мультикоптерах для создания подъемной силы под воздействием давления от пропеллеров используются мощные батареи. Если ваша батрея разряжена, то этой энергии не хватит для подъемной силы вашего квадрокоптера это может привести к аварии, если вы не используете систему предупреждения (Lipo Alarm). Во время первых полетов летайте на короткие растояния, пока вы не знатете свой расход заряда аккумулятора и используйте один из следущий методов мониторинга батареи для того, что бы у вас было достаточно сил на оставшемся запасе емкости приземлится (и не убить батарею от глубокого разряда).
- Модуль питания APM имеет мониторинг напряжения батареи для получения дополнительной информации, посетите страницу модуля питания для измерения напряжения и тока.
- Вы также можете запрограммировать регуляторы ESC используя замедление или отключение CutOff при низких напряжениях.
- Для ArduPilot 2/2.5/2.6 без модуля питания настоятельно рекомендуем вам установить Battery Alarm
-
- Для 3S LiPo батарей, два провода можно припаять к P-PCB непосредственно, или вы можете подключиться к разгруженного затвора вашей батареи.
- Battery Monitor Alarm имеет зуммер и светодиоды, которые функционируют следующим образом:
- Мигает и пищит когда напряжение меньше 9.8 вольт у батареи
Примечание: Если вы используете Battery Monitor, всегда подключайте к основному проводу LiPo батареи перед подключением балансировки порта провод к АРМ.
Измерения вибрации
Для режимов удержания высоты и Loiter важно, что бы ваши уровни вибрации были низкими. В приведенных ниже инструкциях показано, как измерить уровень вибрации. Если вы обраружите , что они выше положеных следуйте советам и настройке на странице гашения вибрации
Пожалуйста , выполните следующие шаги для обеспечения иследования уровня вибрации:
- Подключите APM к Mission Planner
- Перейдите в Config / TUNING -> Standart Params и установите в разделе "Log Bitmask (LOG_BITMASK)" значение Default+IMU . Это позволит записать данные с акселерометра в журнал APM.
- Нажмите кнопку "Write Params"
- Полетайте на вашем квадрокоптере в режиме стабилизации и старайтесь его удерживать на месте (но не нужно быть совершенно стабильным)
- Отключите LiPo батарейку, подключите APM к Mission Planner.
- Загрузите последний журнал данных с памяти полетного контроллера (как это можно сделать описано тут)
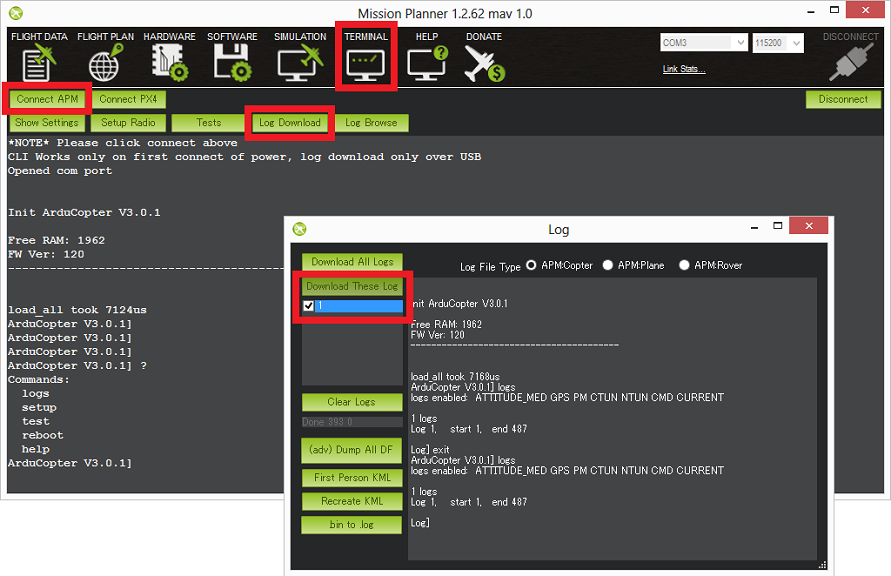
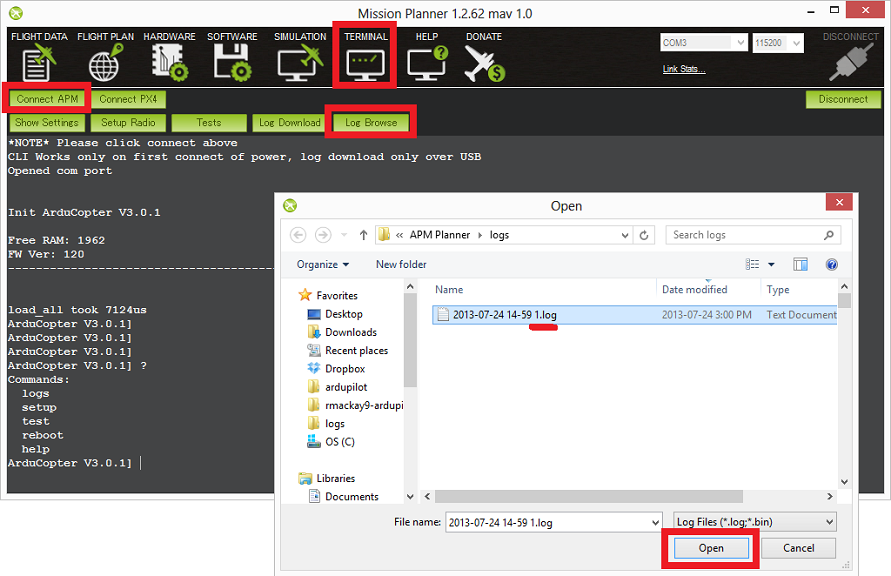
- После завершения загрузки логов , закройте окно "Log" и нажните кнопку "Log Browse" и откройте последний файл журнала.
- Когда вы откроете лог, прокрутите вниз и выберите любое IMU сообщение. Нажмите на столбец AccX и нажмите на кнопку "Graph this Left". Повторите эти действия для столбцов AccY и AccZ для построки графика , как показано ниже.
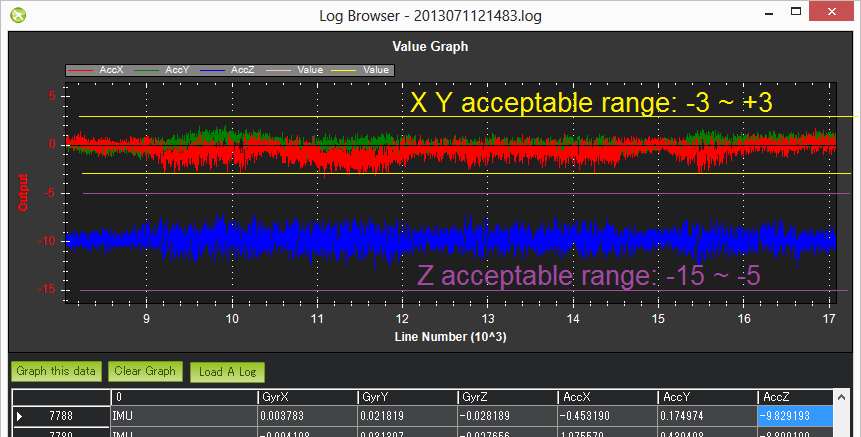
- Проверьте масштаб слева и убедитесь, что ваши уровни вибрации для AccX и AccY в районе от -3 до +3. Для AccZ приемлемый диапазон от -15 до -5. Если Ваши показания превышают указанные нормы - посетите страницу решения поглощения вибрации.
- После того, как вы завершите изучения логов подключитесь Mission Planner к APM и перейдите в разел Standart Parametrs для востановления Bitmask в Default (это нужно для того, что бы в журнал не писалась информация по уровню вибрации).
Настройка и тюнинг крена и тангажа (Pitch and Roll)
Хотя есть много выгоды, которые могут быть настроены в АРМ: Copter, чтобы получить оптимальную производительность, наиболее важным является значения Оценить крена и тангажа P, которые превращают желаемую скорость вращения в соответствии с мощностью двигателя. Уже одно это, скорее всего, получить его летать достаточно хорошо, по крайней мере в режиме стабилизации.
Некоторые общие советы о том, как настроить этот параметр:
-
Слишком высокая и вертолет быстро колеблются в рулон и / или поле
Слишком низкая и вертолет станет вялым
Мощные вертолет должен использовать более низкую прибыль, под питанием вертолеты являются более высокая прибыль
Тюнинг в полете
Коэффициент Roll P и Pitch P может быть настроена в полете с помощью 6-го канала вашего передатчика, выполните следующие действия:

- Подключите APM к Planner Mission
- выберите Config/Тюнинг -> APM:Copter PIDS
- Установите CH6 Opt в значение "Rate Roll/Pitch kP"
- Установите минимум до 0,08, максимум до 0,20 (большинство квадрокоптеров идеальны усиления в этом диапазоне, хотя от небольшого числа квадрокоптеров значение "макс" может быть выше, чем 0,25)
- Нажмите кнопку "Write Params"
- Включите 6 канал вашей аппаратуры в минимальное положение, нажмите кнопку "Refresh Params" и убедитесь, что значения коэффициента Roll P и Pitch P стали 0.08 (или очень близко)
- Поверните ручку 6 канала в максимальное положение, нажмите кнопку "Refresh Params" и убедитесь, что коэффициент Roll P движется до 0,20
- Установите среднее положение на 6-м канале
- Снимите с охраны и взлетите на квадрокоптере в режиме стабилизации регулируя ручку 6-го канала, пока вы не 0получите движения, которые будут чувствительными, но не шатким
- После полета, отключите батарею и подключите APM к Mission Planner
- С помощью регулятора 6-го канала установите то положение, что дало лучшую производительность. Вернитесь к разделу ArduCopter PIDS и нажать кнопку "Refresh Params"
- В полях коэффициента Roll P и Pitch P повторно введите значение, которое вы видите, но только слегка измененные таким образом, чтобы Mission Planer признал изменения и заново отправил в APM (Примечание: если вы повторно введете такие же значения то они не обновятся!). Так, например, если коэффициент Roll P равен "0,1213" установите его в "0.1200"
- Установите параметр 6-го канала обратно в значение "None" и нажмите кнопку "Write Params"
- Нажмите кнопку Отключить в правом верхнем углу и повтороно соединитесь
- Убедитесь, что коэффициент Roll P это то значение, которое вы переписали в предыдущем шаге
Примечание: Так как значения не получаются в реальном времени нажимайте кнопку Refresh Screen для их обновления
Видео тюнинга в полете
Установка среднего газа дросселя
Если ваш квадрокоптер слишком мощный или слишком слабый на взлет и не умещается в пределах 40-60% стика газа - это может быть нормально, если вы используете полетный режим стабилизации (Stabilize), но это может привести к печальным последствиям, если вы перейдете на другие режимы такие , как AltHold, Loiter - где за пределами газа в 40-60% мертвой зоны будут расцениваться , что вы хотите подняться или опуститься.
Поэтому хорошим тоном будет регулирование параметра среднего газа дроселя (так же известного как THR_MID) что бы стик зага в среднем положении был примерно 50% газа и заставлял квадрокоптер немного висеть в воздухе.
Следуйте этим инструкциям , что бы вручную настроить дроссель газа так, что бы квадрокоптер парил при 50% газе:
- Полетайте на квадрокоптере в режиме стабилизации в стабильном висении по крайней мере 30 секунд
- Отключите батарею и подключите APM к Mission Planner
- Перейдите на экран терминала нажав кнопку Terminal , подключитесь в терминальном режме нажав Connect APM и далее спустя 5 секунд нажмите Log Download. (подробная информация о работе с DataFlash журналов можно найти здесь )
- После того , как вы скачали закройте окно "Log" и нажмите кнопку "Log Browser" откройте последний файл в папке журнала (это как правило последний файл при сортировке по дате и имени)
- Когда появится обозреватель логов, прокрутите вниз, пока не найдете строчку "CTUN". Нажмите на колонку "ThrOut" и нажмите на кнопку "Graph this data Left»
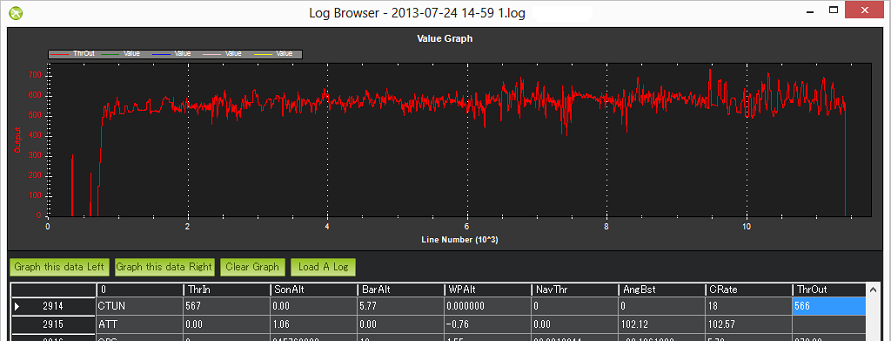
- Ссылаясь на шкале слева от графика, примерно оцените, какой уровень дроссельной заслонки газа было во время висения. В приведенном выше примере (который был излишне долгим полетом), середина дросельной заслонки по-видимому будет около 550.
- Примечание: если средняя дроссельной заслонка ниже 300 (т.е. 30%), то у вас есть очень энерговооруженный квадрокоптер и было бы лучше, чтобы добавить ему дополнительный вес (т.е. больше батареи) или уменьшить мощность каким-то другим способом (меньшие двигатели , смена типа батарей из 4S на 3S, и т.д.)
- Если средняя дроссельной заслонки выше 700 (т.е. 70%), то у вас есть очень слабовооруженный квадрокоптер. Вы должны рассмотреть вопрос об увеличении мощности двигателей и регуляторов ESC или использовать батарею более высокого напряжения (то есть перейти от 3S к 4S батареи).
- Откройте программное обеспечение Mission Planner -> Standart Params и обновите положение среднего дросселя (THR_MID) к значению расчитаным выше (вы найдете его в нижней части списка)
- Нажмите кнопку "Write Params"

- В следующем полете вы должны висеть в воздухе при уровне газа 50% в режиме стабилизации
Сохранение значений трима и Авто-трим
Ветер имеет сильное влияние на ваш квадрокоптер и будет толкать его. Однако вы можете обнаружить , что во время полета в режиме стабилизации, даже в безветренную погоду, ваш квадрокоптер может иметь тенденцию к улетанию в сторону. Это может в значительной степени исправлено с помощью "Save Trim" или автоматической функции "Auto Trim"
Ручное Save Trim
Трим простой метод и предоставляет в себе в основном тримирование с вашей аппаратуры APM
Как это сделать:
1. Убедитесь, что ваш переключатель 7-го канала показывает значение выше 1800 в Mission Planner в разделе калибровке радио.

2. Установите в разделе ArduCopter PIDs параметру CH7 opt значение "Save Trim" и нажмите кнопку "Write Params".
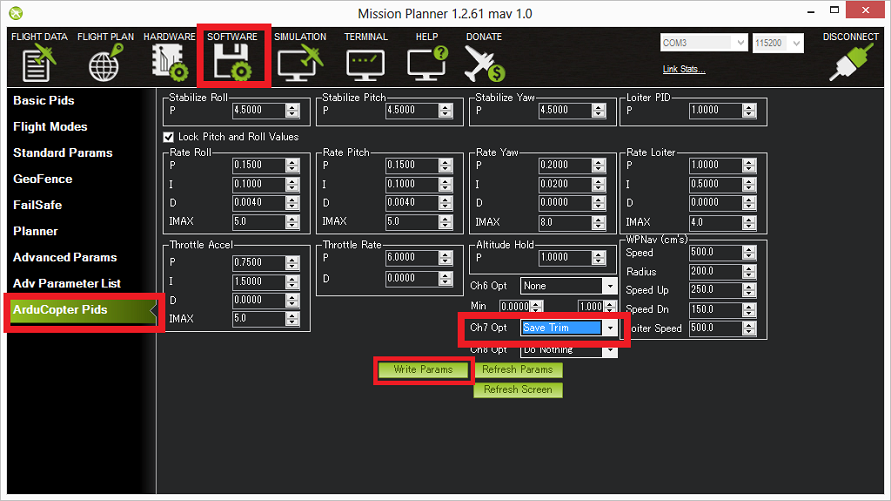
3. На аппаратуре установите переключатель отвечающий за 7-й канал в выключеное положение и взлетите на квадрокоптере в режиме стабилизации, используя тримы на аппаратуре выставите нужный уровень, что бы аппарат смог зависнуть в воздухе.
4. Осуществите посадку на землю и установите газ на ноль
5. Отпустите правый стик наклона (у аппаратуры в режиме Mode2) крена и тангажа, что бы он отцентровался и переведите переключатель 7-го канала в высокое положение как минимум на 1 секунду.
6. Сбросьте трим на аппаратуре крена и тангажа (Roll & Pitch) обратно в центр и взлетите снова и аппарат должен летать по уровню горизонта. Если этого не произошло - повторите шаги 3, 4 и 5.
Auto Trim
С автоматическим тримированием крена и тангажа трим захватывается, когда вы летаете в стабильном удержании.
1. Найдите безветренную площадку с достаточным пространством для того , что бы пролететь без сбоев и столкновений с чем-либо.
2. Держите стик газа внизу и вправо в течении 15 секунд, пока не увидите на плате циклически по очереди мигающие светодиоды: красный, желтый и синий.
3. Взлетите на аппарате и в течении приблизительно 25 секунд стабильно ужерживайте его
4. Осуществите посадку на землю и поставте стик газа в ноль и подождите несколько секунд (значения трима запишутся в память EEPROM)
5. Взлетите снова в режиме стабилизации и проверьте ваш квадрокоптер на удержание в воздухе, если этого не произошло , то повторите шаги 2, 3 и 4.
Примечание1: Вы можете проверить эту процедуру указанную выше на земле с отключением батарейки. Подключите APM к Mission Planner и наблюдайте на экран полетных данных Flight Data имитируя выполнения вышеуказанных шагов.
Примечание 2: Вы можете вручную установить значения тримов через список Advanced Params в Mission Planner. Roll Trim = AHRS_TRIM_X, Pitch trim = AHRS_TRIM_Y. Оба значения в радианах левого крена и тангажа вперед будучи отрицательными числами.
Примечание 3: Практически невозможно избавиться от дрейфа в воздухе, что бы квадрокоптер полностью был неподвижным.
Видео демонстрации сохранения Trim и Auto Trim
Тест радиоаппаратуры
Установите тримы ваших стиков аппаратуры (кроме дросселя газа) перед настройкой радио. С вашей включенной аппаратуры двигайте стики и соответствующие бары должны показывать , что они меняются.
Экран входящего радиосигнала
(Все контакты должны быть подключены):
Медот командной строки CLI
Установите тримы ваших стиков аппаратуры по центру (кроме дроселя) перед настройкой радио. В CLI перейдите в меню и введите "radio". Перемещайте все стики управления в крайние зоны. Если у вас подключен 7-й канал к APM убедитесь, что его значение LOW по-умолчанию.
После настройки проверьте значения PWM/ШИМ. Для проверки радиоаппаратуры выйдите из настройки и войдите в меню "test". Ввведите "radio" и посмотрите значения:
Каналы:
- CH1, 2, 4: нейтральны
- 0, extremes
- + - 4500 (примерно)
- CH 3: нейтрален
- 0, extremes
- 800
- CH5: (переключатель режима полетов) любое значение от 0 до 1000
- CH6: (AUX 2, настройка) Любое значение
- CH7: (используется для ручной настройки удержания дросселя) от 0 до 1000
Процесс тестирования полета
Для тестирования режимов Loiter и AltHold
- Настройте свой APM так, что бы режим стабилизации был первым на трехпозиционным переключателем режима на вашей аппаратуре радиопередатчика, режим AltHold должен стать вторым, а третьим - режим Loiter.
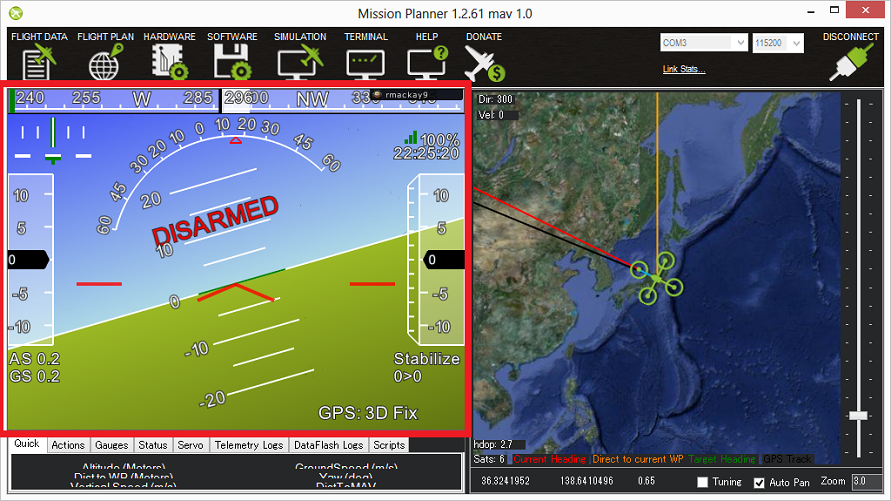
- Очень важно, что бы режим стабилизации работал нормально. Установите режим стабилизации , включите аппаратуру и подключите аккумулятор. Подождите пока GPS зафиксируется по спутникам (Синий светодиод на APM должен гореть постоянно перед снятием с охраны (arming)). Рекомендуется подождать немного, что бы GPS поймал еще дополнительные спутники.
- Внимание GPS UBLOX работает по-другому!
- На GPS UBLOX один светодиод показывает подачу питания, а второй светодиод будет мигать, когда спутники зафиксировались. прежде чем можно вооружить; Нажмите кнопку Безопасность в течение 5 секунд, чтобы освободить безопасность - (Blink два раза, пауза, повтор).
- Несколько секунд (не больше 5 секунд) уведите стик газа вниз и враво (на аппаратуре режима MODE2) , что бы снять двигатели с охраны (arming).
- Начните летать в режиме стабилизации. Убедитесь, что вы можете взлететь, комфортно летать и садиться. Если вы нашли ровную поверхность (без уклона), приземлитесь и выполните комаду "Level" в Mission Planner. Отлетайте целую батарею, почувствуйте контроль над полетом (Это так же откалибрует компас).
- Замените батарею и попробуйте автоматические режимы. Во-первых попробуйте режим AltHold на высоте около 20 метров. Ваше положение дроссельной заслонки записывается как "зависшая точка" при переключении на режим удержания высоты, поэтому важно , что вы не подымались или опускались в момент переключения на этот режим. Ваше состояние должно позволить летать вокруг на квадрокоптере сохраняя ту же высоту (плюс-минус метр или около того).
- Если этот режим работает хорошо, то попробуйте перейти в режим Loiter. Просто летайте в безопасном месте с большим пространством на высоте около 20 метров и перейдите в режим Loiter. Попробуйте остаться в таком положении плюс или минус около 5 метров.
- Когда вы летаете в режиме Loiter или AltHold и если, что-то неожиданное начинает происходить , переключитесь обратно в режим стабилизации и сажайте квадрокоптер. (Вы не сможете посадя аппарат остановить моторы находясь в режиме Loiter и AltHold).
- Поставьте на охрану (disarm) ваш квадрокоптер и запись в журнале остановиться.
Какое поведение вы должны ожидать от этого теста?
В режиме удержания высоты квадрокоптер должен оставаться на высоте на которой вы инициилизировали этот режим , плюс-минус около метра. добавление датчика sonar поможет улучшить точность до 20 сантиметров на высоте до 20 метров над землей.
Предупреждение! В любом режиме, который использует барометр: AltHold, Loiter, Auto, Land, RTL если квадрокоптер становиться неустойчивым, когда вы находитесь близко к земле или на момент посадки (а так же если происходит автоматическая посадка и квадрокоптер подпрыгивает или не способен выключить моторы после посадки) вы вероятно не правильно расположили полетный контроллер , что барометр (высотомер) испытывает давление создаваемое на квадрокоптер воздушным потоком отраженного от земли.
В этом легко убедиться посмотрев логи высотомера и видя странные колебания у земли. Если это постоянно является проблемой вам нужно будет переместить полетный контроллер в другое место от этого эффекта "стирки" или оградить его соответствующим проветриваемым корпусом. Добиться успеха можно путем летных проверок и чтением бортового журнала.
Предупреждение: Полетный контроллер ArduPilot Mega использует барометр (высотомер) , который измеряет давление воздуха в качестве основного средства определения высоты и если давление воздуха меняется в вашем районе полета - квадрокоптер будет следить за изменением давление и менять высоту.
В режиме Loiter квадрокоптер должен оставаться в пределах 4-5 метрах диаметра "круга" вокруг позиции. Если есть ветер это может занять несколько секунд , что бы компенсировать это. Если ветер сильный вы можете увидеть как квадрокоптер не будет справляться и у вас будет больше ошибок (диаметр будет 10-15 метров)
Пилот может использовать стики управления для перемещения вручную в режиме Loiter. Вы можете использовать дроссель газа, что бы поднять или опустить квадрокоптер.
- Предупреждение: домашняя точка должа соответствовать фактическому положению квадрокоптеру, когда он взлетел:
- Это очень важно, что бы GPS зафиксировал спутники перед снятием с охраны для того, что бы режимы RTL, Loiter, Auto и любой GPS зависимый режим работал должным образом.
- Для конфигурации APM ArduCopter если вы получили фиксацию по спутникам GPS, а затем снимая с охраны (arming) ваша домашняя позиция становится тем местом, где он был снят с охраны.
- Это будет означать, что если вы перейдёте в режим RTL ArduCopter вернется в место, где он был снят с охраны (arming)
- Для конфигурации АРМ ArduCopter снимайте с охраны там, где хотите устновить то место, куда он должен вернуться.